Přistání bočních stupňů při misi Arabsat 6A (Foto: SpaceX)
Nedávno jste si u nás mohli přečíst životopis Larse Blackmora, který ve SpaceX pracuje na přistávání raket Falcon. Při jeho psaní jsme narazili na Blackmorovy technické články, které podrobněji popisují, jak tato přistání fungují. Dnes tedy nahlédneme pod pokličku problematiky přistání na Marsu i Zemi, které by bez Blackmorových algoritmů nebylo dostatečně přesné.
Nejdříve se vrátíme do doby, kdy Lars pracoval v JPL. Začneme u přistání na Marsu, což je oblast, kde se Lars Blackmore začal poprvé potýkat s obtížemi při přistávání. Problémem přesného přistání se Blackmore začal zabývat v roce 2007 a o tři roky později vydal na téma navádění sestupující sondy spolu se dvěma kolegy článek. Navazovali v něm na předchozí práce, ve kterých se autoři snažili vyvinout řídící algoritmus založený na konvexní optimalizaci určený pro motorický sestup s minimální spotřebou paliva. Lars a jeho kolegové se snažili navrhnout řídící algoritmus i pro případ, kdy neexistuje žádná realizovatelná trajektorie, se kterou je možno dosáhnout zamýšleného místa přistání. Řešením tohoto problému je vytvořit trajektorii novou, s jejíž pomocí se dostaneme do minimální vzdálenosti od plánovaného cíle, a to s optimálním použitím dostupného paliva. Na tento řídící algoritmus získali o 4 roky později i patent. Proč je však potřeba přistát s takovou přesností například zrovna na Marsu?
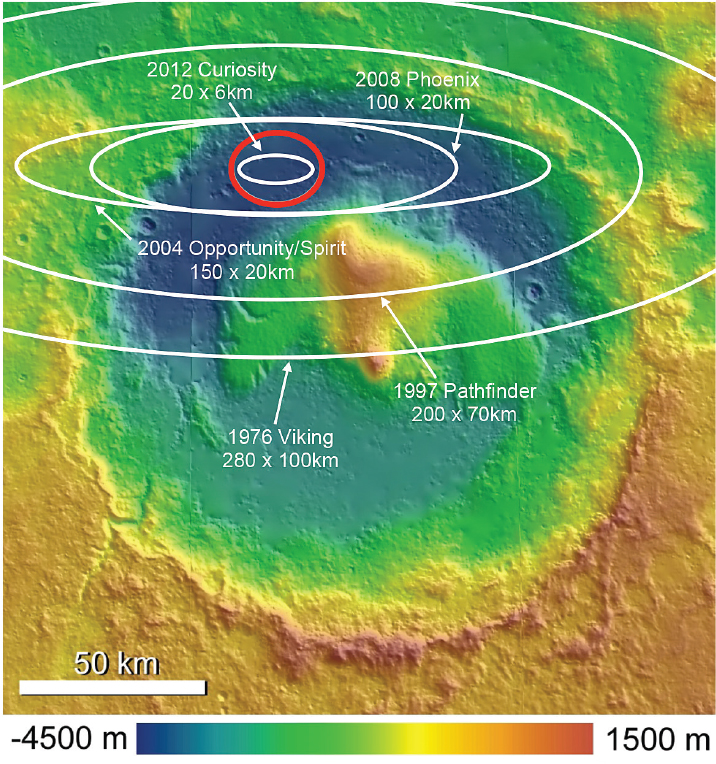
Následující obrázek ukazuje, jak se postupně zlepšovala schopnost přístání robotů určených k průzkumu Marsu. Zobrazené elipsy ukazují oblasti, kde s 99% pravděpodobností robotický průzkumník přistane. A je zajímavé sledovat, jak se přesnost přistání v čase měnila. Z elipsy o rozměrech 280 x 100 km v roce 1976 u sondy Viking až k elipse 20 x 6 km v případě vozítka Curiosity. Snadno si lze odvodit, že přesnost přistání se zlepšila minimálně 10násobně. Pokud by se z přistávacího manévru vynechaly padáky, pravděpodobně by se zpřesnil ještě více.
Přistávací elipsy úspěšných amerických misí a všechny jsou promítnuty na mapu kráteru Gale (Zdroj: Ryan Anderson, USGS Astrogeology Science Center)
Z obrázku však neplyne důležitá věc, že přistání sond na Marsu se řídí daleko více kritérii bezpečnosti než vědeckými cíli. Přistávací oblast musí být velká, plochá, bez kráterů a balvanů. To se názorně ukázalo v případě sondy Phoenix, která na Marsu přistála v roce 2008. Tehdy dokonce došlo k tomu, že po detailním fotografování primární přistávací oblasti bylo nutno změnit oblast přistání a to pouhých několik měsíců před přistáním landeru. Pokud by přistávací přesnost byla vyšší, nemuselo by k tomu dojít. Vyšší přesnost přistání umožňuje prozkoumat jeskyně a údolí Marsu, vrátit vzorky půdy z jiné planety nebo přistát s raketou zpět na Zemi.
Jaké různé výzvy čekají vlastně čekají na sondu či raketu, která se rozhodne přistát na planetě?
Zkusme se podívat podrobněji na přistání Falconu 9 po misi na nízkou oběžnou dráhu. Klíčem k přesnému přistání je schopnost řídit disperze, což jsou odchylky od plánované trajektorie způsobené okolním prostředím. Aby přistávající raketa mohla dosednout na Mysu Canaveral či na ASDS, musí být schopna kontrolovat minimálně 99 % těchto disperzí. Převedeme-li tato procenta na odchylku od cíle, znamená to, že při přistání na ASDS musí Falcon 9 přistát s odchylkou maximálně 10 metrů. Při návratu na pevninu je tolerance malinko větší, zde stačí mít odchylku do 30 metrů. Zkusme si tu obtížnost přistání na ASDS představit ještě jinak. Samotná plošina má rozměry 91 x 52 metrů a když Falcon 9 rozloží přistávací nohy, jsou jejich konce od sebe vzdáleny více než 18 metrů. Zde opravdu není prostor pro velkou odchylku při přistání.
Vizualizace letu prvního stupně Falconu 9 od startu až do přistání (Zdroj: Lars Blackmore)
Obrázek výše znázorňuje různé fáze letu prvního stupně rakety Falcon 9. Rozšiřování a zmenšování obálky okolo letové trajektorie představuje zvětšování a zmenšování disperzí. Ihned po startu dochází účinkem větru k rychlému nárůstu disperzí. Přibližně po dvou a půl minutách po startu, ve výšce kolem 80–90 kilometrů, se první stupeň oddělí a dál na orbitální dráhu pokračuje jen druhý stupeň s nákladem, ale ten nás teď nezajímá.
Vůbec první přiležitostí, jak zmenšit disperze, je pro vracející se první stupeň Falconu 9 provedení zpětného zážehu. Kontrola disperzí znamená, že musí přesně vykonat zpětný zážeh a také upravit svou polohu pomocí trysek se stlačeným dusíkem. Samozřejmě při návratu do atmosféry pak opět dochází k nárůstu disperzí, ale zároveň raketa provádí vstupní zážeh a používá roštová kormidla. Roštová kormidla přitom představují jeden z klíčových prvků pro snížení disperzí. Při prvních pokusech o přistání Falconu 9 do moře měla přistávací oblast velikost přibližně 10 kilometrů, ale díky použití roštových kormidel se odhaduje, že došlo ke zvýšení přesnosti přistání o tři řády.
A při samotném přistání dochází i k závěrečnému brzdícímu zážehu, kdy z trajektorie mířící původně mimo přistávací oblast dojde k nasměrování na místo přistání. Že je tato opatrnost na místě, se ukázalo při nepovedeném přistání při misi CRS-16. Samozřejmě je také nutno přistávající první stupeň narovnat. Všechny tyto změny se přitom musí vykonávat tak, aby nedošlo k překročení konstrukčních limitů rakety. Jakékoliv výpočty změn polohy a směru se navíc musí provádět zcela autonomně a ve zlomcích sekundy. Zpoždění při rozhodování může vést k havárii, například kvůli předčasnému vyčerpání pohonných hmot. Nutno nezapomínat i na nutnost opakované úpravy letové trajektorie v případě selhání kterékoliv části řídícího hardwaru. Zde možno vzpomenout na problém se zaseknutým ventilem při misi CRS-6 či poruchu hydraulického čerpadla při misi CRS-16, která znemožnila činnost roštových kormidel, a přistávající první stupeň se tak místo toho snažil provádět korekce dráhy výraznějším nakláněním centrálního motoru Merlin.
Pro řízení prvního stupně při sestupu SpaceX používá softwarový nástroj CVXGEN, který umožňuje velmi rychlou konvexní optimalizaci letové trajektorie.
Za zmínku stojí také skutečnost, že od prvního přistání prvního stupně v prosinci 2015 byla všechna nepovedená přistání způsobena selháním hardwaru, nikoliv chybou navigačního softwaru. Kromě již uvedených příkladů misí CRS-6 a CRS-16 lze zmínit také nedostatek zápalné směsi centrálního stupně prvního Falconu Heavy či vyčerpání hydraulické kapaliny pro roštová kormidla u mise CRS-5. Navigační software při všech těchto misích pracoval naprosto spolehlivě.
Pokud si chcete o přistávacích algoritmech přečíst podrobněji a náročnější matematika vám nedělá problémy, můžete se podívat na Blackmorovu vědeckou práci o přistání na Marsu s pomocí konvexní optimalizace.
Čas od času se věnujeme tarifům, které pro své zákazníky nabízí společnost SpaceX při používání…
Noland už používá své neurální rozhraní 14 měsíců. V delším textu na X se rozepsal…
Thomas Oxley, šéf Synchronu, konkurenta Neuralinku, nesouhlasí s dlouhodobou vizí Elona Muska a Neuralinku. Podle…
Blíží se start mise Fram2, která bude první pilotovanou výpravou mířící na polární dráhu. Posádka…
V dalším shrnutí novinek a zajímavostí o Neuralinku bude řeč například o těchto tématech: Apoorv…
Dnešní přehled novinek se bude věnovat využití satelitní služby Starlink ve vlacích. Nejprve se podíváme…
{kind=link}
{kind=link}
Zobrazit komentáře
Není mi jasné, jak se může vyčerpat hydraulické kapalina pro roštová kormidla.
Pokud nemáš uzavřený okruh, tak to jde hravě.
Pro mě je rozptyl, disperse či odchylka jedno..... Důležité je, že je to skvělý článek.... díky za něj a víc takových.
Super článek, pro mě perfektně srozumitelný. Díky za něj.
Děkuji za pěkný článek.
Ještě by mě zajímalo jak funguje naklánění motoru Merlin a jestli se naklání pouze jeden.
Roštová kormydla se tedy používají pri vyšších rychlostech a naklánění motoru jen až při samotném přistávacím zážehu?
děkuji
Rádo se stalo.
Naklánění je poměrně snadné. Mrkni na toto video, běhěm prvních 20 sekund kamera obejde testovací stav. Testované zařízení visí na 4 černých závěsech, ale tebe zajímají ty dva boční stříbrné písty, které to naklánění provádí. Můžeš i na tomto obrázku, hledej TVC actuator.
Co se týká roštových kormidel, to máš pravdu, ty nejlépe fungují při vysokých rychlostech (mach 1.2 a výše).
Ten motor, tady ber do úvahy, že přistávající raketa nemá paliva na rozdávání. V článku o zrušených projektech - brzdění pomocí nohou, se píše, kolik ho má přibližně k dispozici. A vyhazovat palivo na cokoliv jiného než na snižování terminální pádové rychlosti by bylo plýtvání. Samozřejmě plus ještě ještě to finální naklonění do vertikály (např. krásné záběry z dronu při přistání CRS-11).
Tak ja jako prvni podekuji za skvely clanek. Presne takove clanky jsou super a za me bych se nebal jit i hloubeji do dane problematiky ☺
Za zmínku stojí také skutečnost, že od prvního přistání prvního stupně v prosinci 2015 se SpaceX byla všechna nepovedená přistání způsobena selháním hardwaru, nikoliv chybou navigačního softwaru.
Asi tam něco nabývá nebo naopak chybí.
Jinak taky jsem spíš pro rozptyl.
Jo, chybí tam slovíčko následující. Díky za upozornění.
disperze - rozptyl
Fakt sem dlouho přemýšlel, jak tu část přeložit a napsat, A ač je rozptyl synonymum, zdálo se mi vhodnější použít slovo disperze.
No jo, asi se mi to příčí proto, že jsem chemik a disperze je pro mne něco úplně jiného a nemá to synonymum rozptyl. :)
Já jsem taky vzděláním chemik a takže tě chápu.
Ale sami si pánové řekněte, raketu rozptyluje atmosféra, no schválně, jak vám to zní :-D
Nechci být protivný, ale raketu disperguje atmosféra snad zní líp? :)
Já jsem také vzděláním chemik, tak mi snad kolegové dovolí zasáhnout do jejich debaty. :-)
Co se tomu výrazu vyhnout například použitím slova odchylka?
(původní text)
Klíčem k přesnému přistání je schopnost řídit disperze, což jsou odchylky od plánované trajektorie způsobené okolním prostředím. Aby přistávající raketa mohla dosednout na Mysu Canaveral či na ASDS, musí být schopna kontrolovat minimálně 99 % těchto disperzí.
(upravený text)
Klíčem k přesnému přistání je schopnost řídit odchylky od plánované trajektorie způsobené okolním prostředím. Aby přistávající raketa mohla dosednout na Mysu Canaveral či na ASDS, musí být schopna kontrolovat minimálně 99 % těchto odchylek.
(a nápodobně i dále v textu)
Zní to hezky.
Řekl bych, že to jsou synonyma a lze použít obojí.
cíly -> cíli
Díky. Opraveno.