

SpaceX má robota na zajištění rakety po přistání na plovoucí plošině
AKTUALIZACE (1. 4. 2020): Všechny známé informace o robotovi jsem shrnul do samostatného článku, který je průběžně aktualizován.

Zachráněný stupeň při misi CRS-8. Jednalo se o první úspěšné přistání na ASDS. (Foto: SpaceX)
Mezi fanoušky SpaceX se o tom šuškalo a spekulovalo už několik týdnů, ale až dnes se objevila první pořádná fotka. SpaceX vyrobilo robota, který by měl usnadnit a zrychlit zajištění rakety po přistání na autonomní mořské plošině (ASDS). Jak bude robot fungovat a k čemu je to všechno vůbec dobré? To se dozvíte za chvíli. Nejdříve je však potřeba si vysvětlit, jak vlastně z logistického hlediska probíhá záchrana prvních stupňů raket a jejich následné zpracování.
Trocha historie
SpaceX se seriózně zabývá problematikou znovupoužitelnosti vlastních raket zhruba od roku 2012. Společnost nejdříve trénovala přistávání pomocí raketky Grasshopper a časem se začala pokoušet o přistání prvního stupně jejich hlavní rakety Falcon 9. První pokusy o přistání na plovoucí mořské plošině (ASDS) skončily neplánovaným ohňostrojem, ale s každým dalším pokusem byl úspěch blíž a blíž. K prvnímu měkkému přistání nakonec došlo v prosinci 2015 a pro SpaceX to byl obrovský důvod k oslavám. První přistání však proběhlo na pevnině, což je snazší než přistání na ASDS. A protože ne každá mise má možnost přistát na pevnině, SpaceX potřebovalo zvládnout i přistání na plovoucí plošině. K prvnímu úspěšnému přistání na ASDS nakonec došlo v dubnu 2016 při misi CRS-8. SpaceX se do dnešního dne podařilo přistát s celkem 8 raketami (3 z nich přistály na pevnině a 5 jich přistálo na ASDS).
Tip: Pokud vás zajímá historie přistávání a ASDS podrobněji, přečtěte si články Historie přistávání a znovupoužitelnosti a Autonomní přistávací plošiny.
ASDS – logistická noční můra?
Přistání jako takové tedy SpaceX už problémy nedělá. Z logistického hlediska je však přistávání na ASDS značně komplikovanější než přistání na pevnině. Když raketa přistane na pevnině, stačí ji chvilku po dosednutí jeřábem naložit na podstavec, odmontovat nohy (nedají se totiž po vyklopení znovu sklopit), odčerpat zbytek paliva, raketu položit na připravený silniční transportér a odvézt do hangáru, kde může proběhnout uskladnění a časem případná renovace pro další let. Celý tento proces je relativně rychlý a levný. Porovnejme to však s přistáním na ASDS:

Detail na upevnění stupně z mise Iridium-1 po příjezdu do přístavu (Foto: SpaceX)
Už několik dní před plánovaným startem musí ASDS vyrazit z přístavu v doprovodu dvou lodí – jedna musí táhnout ASDS (plošina totiž nemá vlastní plnohodnotný pohon) a na druhé lodi je obslužný personál, technici apod. ASDS musí být dopravena do vzdálenosti několika set kilometrů od přístavu a tažná loď nemůže plout moc rychle, takže cesta většinou trvá několik dní. ASDS je následně schopna se sama udržovat na domluvených souřadnicích (pomocí čtyř motorů, které však nelze použít pro běžný pohon). Zde čeká na raketu, která se na těch samých souřadnicích poté pokusí přistát. Obě podpůrné lodě se během této doby drží v bezpečné vzdálenosti. Řekněme, že přistání bylo úspěšné a raketa měkce dosedla na palubu OCISLY nebo JRTI. V takovém případě se musí obslužný personál co nejdříve nalodit na ASDS a raketu zajistit (jinak hrozí její překlopení či sklouznutí z paluby při cestě do přístavu). Momentálně probíhá zajištění tak, že se raketa podepře jednoduchými zvedáky, které na sebe přenesou část váhy z kompozitních přistávacích nohou, a následně se k palubě pod raketou přivaří kovová oka a k nim se raketa v podstatě přiváže. Lana se přichytí za kovový “octaweb”, což je těžká kovová konstrukce, do níž jsou vsazeny motory ve spodní části rakety. Poté se pracovníci vrátí na svou loď a celé trio plavidel se vrátí do přístavu, kde je následně raketa zpracována a odvezena podobně jako v případě přistání na pevnině.
Myslím, že už z tohoto zkráceného popisu je evidentní, že záchrana prvního stupně na moři stojí mnohem více peněz a zabere podstatně více času než záchrana na pevnině. Je potřeba platit za ASDS (plošina je pronajatá) a její celoroční kotvení v přístavu, k tomu dvě obslužné lodě a související personál, palivo pro všechny tři plavidla, povolení na využití prostorů v přístavu a pronájem místních jeřábů a dalších zařízení potřebných pro přesun stupně na silniční přepravník a tak dále. Většině těchto nákladů se SpaceX nevyhne, ať dělá, co dělá, ale minimálně v oblasti zajištění rakety po přistání se dá aktuální proces nejen urychlit, ale také zlevnit a především je možné snížit riziko úrazu pracovníků. Samotné zajištění totiž není tak snadné, jak by se mohlo na první pohled zdát. Je potřeba si uvědomit, že se provádí na moři, kde se, jak jistě víte, relativně běžně vyskytují vlny, silný vítr nebo třeba i bouře. A když to zkombinujeme se skutečností, že se vám při zajišťování nad hlavou tyčí 50metrová raketa, které často v nádržích zbylo značné množství leteckého petroleje, je evidentní, že se nejedná o zrovna bezpečnou činnost. A SpaceX podle všeho přišlo s geniálním řešením tohoto problému.
Představuje se Octagrabber
Na Redditu se uživatel “aftersteveo” (vlastním jménem Stephen Marr) podělil o aktuální fotku paluby plošiny OCISLY pořízenou z vrtulníku, na které je pěkně vidět úžasný robot, o jehož existenci se dosud jen spekulovalo. Teď však toto udělátko konečně někdo zachytil na kvalitní fotografii z dobrého úhlu. Dost možná jste si už na základě mého dlouhého úvodu odvodili, k čemu tento robot bude sloužit, ale i tak vám vysvětlím předpokládaný princip jeho fungování.
-

- Paluba OCISLY v přístavu Port Canaveral. V pravém dolním rohu je vidět nízký pásový robot. (Foto: /u/aftersteveo)

-

- Detail robota, který by měl sloužit k zajištění prvního stupně po přistání na OCISLY (Foto: Stephen Marr)

Robotovi se údajně interně přezdívá Optimus Prime Octagrabber (“zachycovač octawebu“), měl by být elektrický a dálkově ovládaný, a bude sloužit k rychlému, snadnému a hlavně bezpečnému zajištění stupňů raket Falcon 9 a Falcon Heavy po přistání na ASDS. V praxi to nejspíš bude fungovat tak, že robot bude během přistání schován na bezpečném místě na ASDS, aby nebyl poničen v případě nepovedeného přistání. Pokud však bude přistání rakety úspěšné, pracovníci SpaceX (kteří zůstanou na své lodi a nebudou se vůbec přesouvat na ASDS) na dálku vyšlou tohoto pásového robota na palubu ASDS a najedou s ním přímo pod raketu. Následně robot zdvihne čtyři hydraulické zvedáky, které jsou vidět na obrázku, podepře raketu a tím ji zajistí proti nechtěnému sklouznutí při plavbě. Tím je celý proces hotový a ASDS se může téměř okamžitě vydat na cestu zpět do přístavu. Velkou výhodou je kromě ušetření času a peněz především to, že obslužný personál bude celou dobu v bezpečí mimo ASDS, neboť robot je ovládán dálkově, a i v případě, že pracovníci budou muset na palubu ASDS třeba kvůli připojení k tažné lodi na cestu zpět (netušímm, jak to mají řešené), riziko nehody či úrazu je mnohonásobně nižší, jelikož tou dobou už bude raketa bezpečně zajištěna robotem. Také je možné, že počet pracovníků doprovázejících ASDS bude moci být časem snížen, neboť celý proces zajištění rakety bude díky robotovi mnohem jednodušší. Tím SpaceX ušetří peníze.
-

- Fotografie úprav na OCISLY, které zprostředkují úkryt pro robota (Foto: Marek Cyzio)

-

- Fotografie úprav na OCISLY, které zprostředkují úkryt pro robota (Foto: Marek Cyzio)

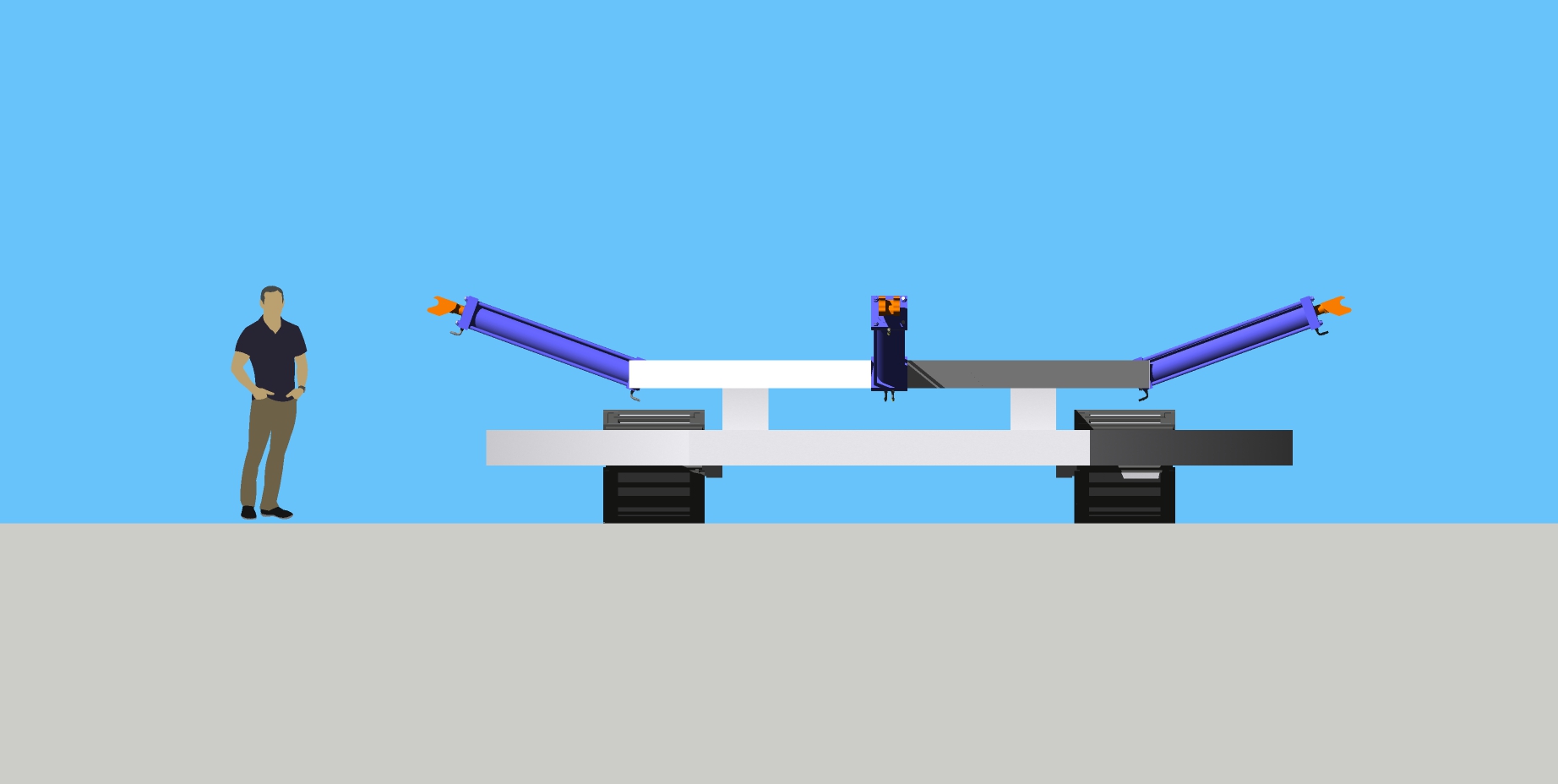
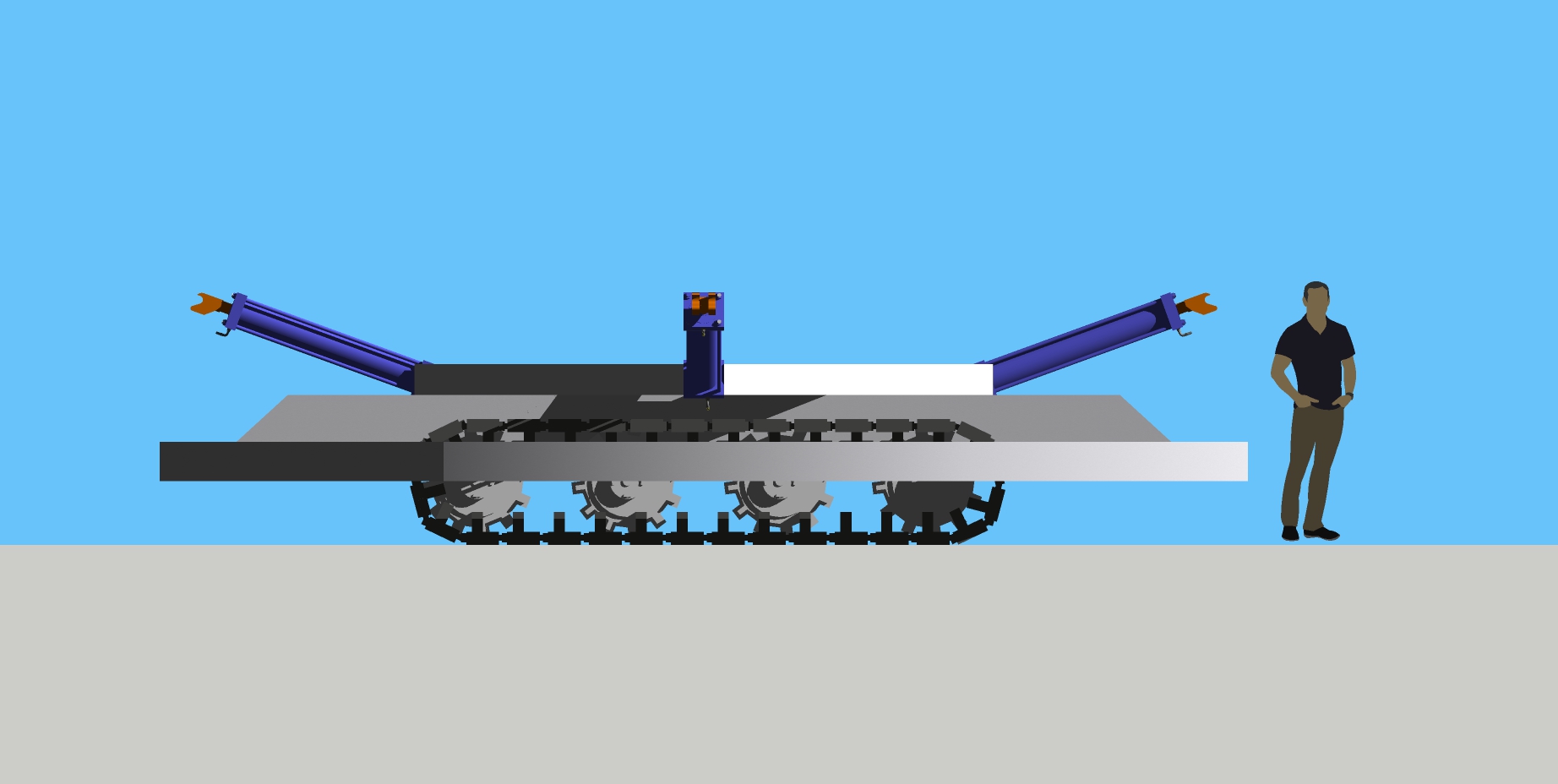
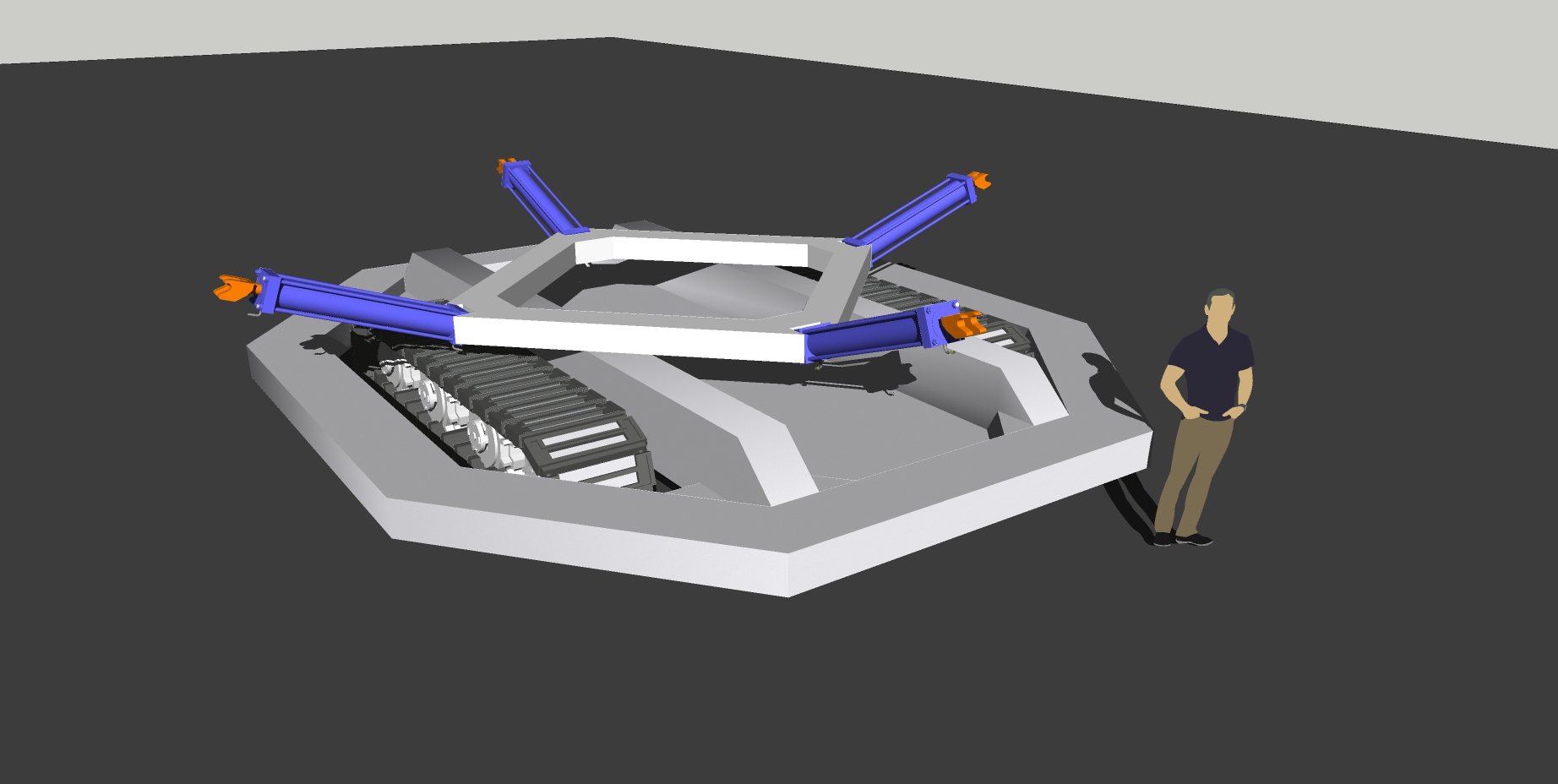
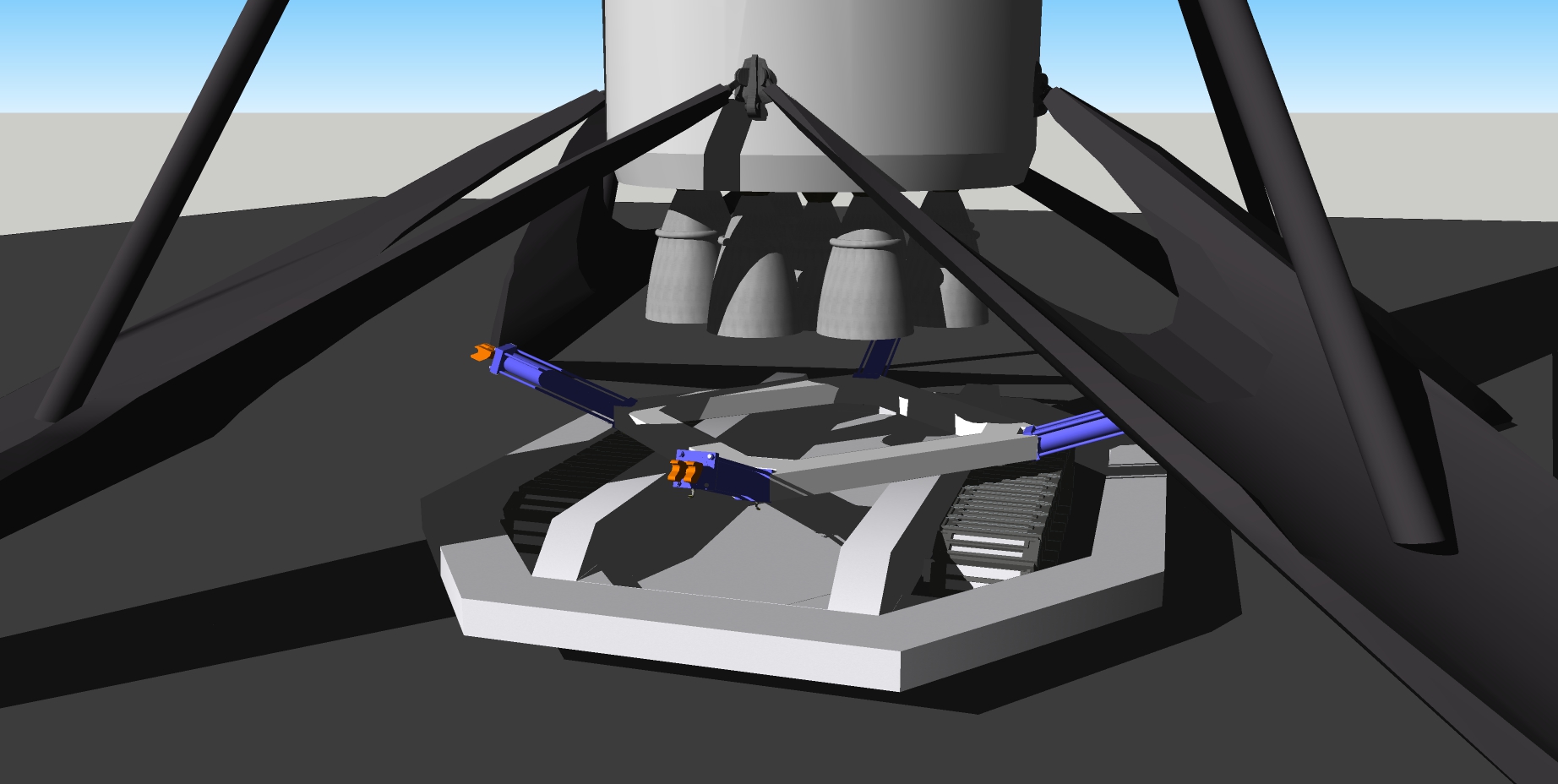
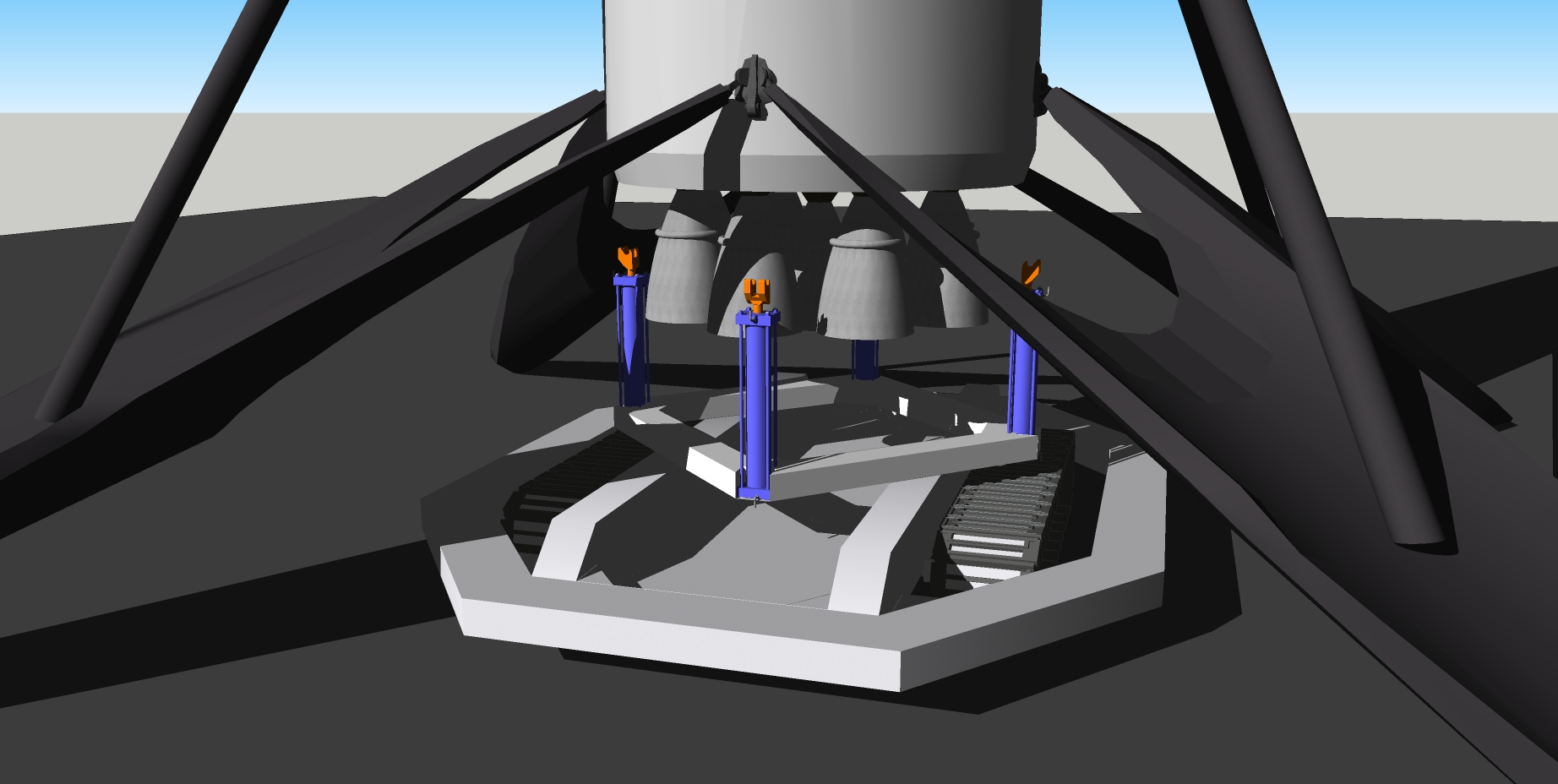
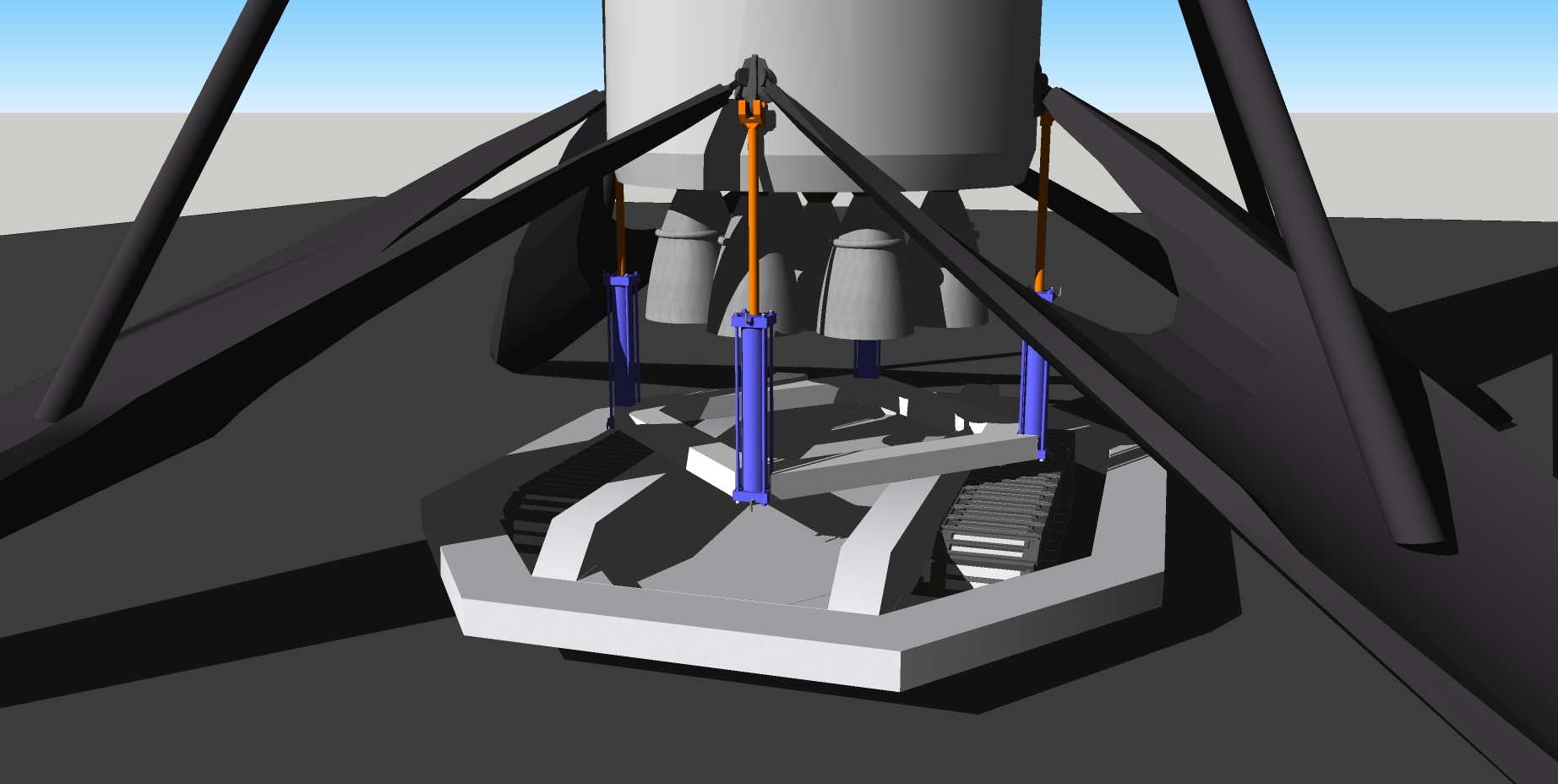
Uživatel Flying Beaver z fóra NASA Spaceflight nedávno vytvořil fanouškovskou vizualizaci fungování robota na základě spekulací. Vypadá to, že v podstatě odpovídají výslednému robotovi a dobře poslouží pro lepší představu toho, jak robot asi bude fungovat:



Optimalizace nade vše
SpaceX se výhledově bude snažit co nejvíce optimalizovat celý proces záchrany stupňů a jejich následného zpracování, neboť každá ušetřená hodina bude důležitá. Společnost plánuje už během letoška startovat v průměru každé dva až tři týdny, a když ASDS potřebuje třeba 3 dny jen na cestu na místo přistání a další 3 dny na cestu zpátky, velice snadno by mohla vzniknout situace, kdy plošina nebude ještě na místě, a raketa přitom už třeba bude připravená. Jistě, SpaceX by mohlo pořídit druhou ASDS pro východní pobřeží, ale provoz jedné ASDS a všeho okolo je opravdu drahý, a SpaceX už teď provozuje dvě – na každém pobřeží jednu –, takže firma radši bude dělat vše proto, aby se vyhnula nutnosti pořídit další, a bude hledat způsoby, jak proces záchrany a zpracování stupňů zjednodušit, urychlit a zlevnit.
Možná si ale říkáte, jak může tento relativně malý robot vlastně udržet tak velkou raketu. Je potřeba si uvědomit následující:
- Raketa je převážně dutá a po přistání také skoro prázdná, neboť téměř všechno palivo bylo spotřebováno na start a přistání. Po přistání raketa váží jen nějakých 25 tun.
- Raketa má velmi nízké těžiště, neboť téměř všechna její hmotnost je koncentrována dole v oblasti těžkých motorů a bytelného octawebu.
- Z fotografie je docela dobře patrné, že robot je dost rozměrný (ono se to nezdá, ale OCISLY má zhruba rozměry fotbalového hřiště – vpravo od robota máte pro srovnání technika v červené vestě). Ale nebojte se, že by se robot pod raketu nevešel, nebo že by mu překážely rozložené přistávací nohy rakety – Falcon 9 je obrovský.
- Robot bude pěkně težký. Zdá se, že je vyrobený z ocelových plátů či něčeho podobného.
- Kombinace hmotnosti robota, nízkého těžiště a zvýšení trakce díky pásům a celkově větší kontaktní plochy (v porovnání s minimální kontaktní plochou mezi palubou a nohami volně stojícího Falconu) by měla znamenat dostatečně bezpečné zajištění.
AKTUALIZOVÁNO (22. 3. 16:08): Na Facebooku se uživatel Chase Hansen podělil o spoustu nových fotek robota na palubě OCISLY. Zde je pár z nich:



Poznámka autora: Údaje a informace v tomto článku jsou v mnoha případech založeny na neúplných informacích či spekulacích, tudíž se místy může jednat spíše o úvahu či fundovaný odhad. Neberte tedy vše jako fakta.
![]() Líbí se vám takovéto články? Chodíte na ElonX rádi a chtěli byste, aby web zůstal bez reklam a autor mohl nadále vydávat kvalitní obsah? Vyjádřete svou podporu a spokojenost pomocí služby Patreon či jinak a zařaďte se tak po bok ostatních dobrodinců, kteří už web podpořili. Děkuji za přízeň!
Líbí se vám takovéto články? Chodíte na ElonX rádi a chtěli byste, aby web zůstal bez reklam a autor mohl nadále vydávat kvalitní obsah? Vyjádřete svou podporu a spokojenost pomocí služby Patreon či jinak a zařaďte se tak po bok ostatních dobrodinců, kteří už web podpořili. Děkuji za přízeň!
Podpořte projekt ElonX
- Mise Starlink 11-11 - 30. 3. 2025
- Mise Starlink 11-13 - 26. 3. 2025
- Mise Starlink 6-80 - 21. 3. 2025




{kind=link}
Zaujalo mě, že píšete, plošina je pronajatá. Kdo ji tedy vlastní, od koho si ji SpaceX pronajímá? Nepodařilo se mi k tomu najít žádné kloudné informace.
Plošiny by měly patřit společnosti McDonough Marine Service.
Přímo se zde nabízí následná fixace pomoci elektro magnetů. Vzhledem k tomu, že se oka pro řetězy k Falconu normálně přivařují, tak ty sily pro udržení na místě je potřeba o něco více než jen zvětšení plochy. Labilnost soustavy pořád jistí nohy. Ty mají opěrný bod nejdále od těžiště.
Souhlasím. Myslím, že pásy zajedou dovnitř a o palubu se vzepře celý spodek robota. A elektromagnety se k fixaci myslím dobře hodí.
Elektromagnety mě také napadly, ale dostupné informace zatím nenasvědčují jejich použití. Budeme se muset nechat překvapit. 🙂
Myslím , že zajištění bude probíhat právě tak .
Po najetí pod první stupeň Falconu a vycentrování robota vůči tubusu dojde ke zdvižení pojezdových pásů a následnému podepření rakety písty . Tím dojde zhruba k více než zdvacetinásobení plochy oproti samotným pásům. Centrální magnet – viz. vyvýšený čtvercový prostor uprostřed. – provede konečnou fixaci.
Dobrý den, oceňuji rychlost, s jakou přebíráte zprávy z http://www.reddit.com/r/spacex/
Tam je zpráva (fotky robota) stará jen cca 8 hodin a zde je již pěkně zpracovaný článek.
Taky jsem kvůli tomu šel spát až někdy v pět ráno. 😀 Jsem tedy velice rád, že to oceňujete.
Dobrý den, je v plánu do budoucna plně automatizovat ASDS? Tedy jeho dopravu z přístavu na určené místo a po přistání a ukotvení prvního stupně zase cestu do přístavu.s doprovodem jen nezbytného personálu.
SpaceX by takový systém určitě bralo, ale nevím o tom, že by firma o to nějak aktivně usilovala. Bylo by hlavně nutné vyměnit současné ASDS za nějakou skutečnou plnohodnotnou loď (a velkých robotických lodí asi moc neexistuje, takže SpaceX by muselo vyvinout vlastní, což jim asi ještě dlouho nebude stát za námahu).
Dobrý den! Díky moc za pěkný článek. Jedna věc mi z něj není jasná. Píšete, že bárka nemá vlastní pohon, ale zmiňujete, že je schopna se udržet na daných souřadnicích. Jak tedy, pokud nemá pohon?
ASDS sice disponuje čtyřmi motory (v každém rohu jeden), ale ty nejsou určeny ke klasickému pohonu, slouží právě jen pro udržení pozice. Nelze je použít pro dlouho cestu z/do přístavu, a tak musí být plošina tažena jinou lodí.