

Neuralink pod lupou #22: Neurochirurgický robot, 1. část – prehistorie
Všechno, co jste kdy chtěli vědět o neurochirurgickém robotu Neuralinku (ale báli jste se zeptat). Tak by se asi dala nazvat tato třídílná minisérie, která původně měla být jedním článkem. Ukázalo se však, že o zmíněném robotickém systému Neuralinku je k dispozici mnohem více informací, než by se dalo čekat.
Seriál má ambice shrnout všechny dostupné informace o futuristickém automatu Neuralinku, který představuje jeden z klíčových komponentů architektury neurálního rozhraní, jenž má jednou propojit člověka s počítačem, léčit neurologická onemocnění a umožnit splynutí biologické a digitální inteligence.
Neuralink stejně jako všechny firmy Elona Muska a mnoho jiných společností v oboru informačních technologií používá metody agile. Postupně vyvíjí nové verze svého produktu, který tak vylepšuje a přidává nové funkce. Proto od roku 2016, kdy byl Neuralink založen, vzniklo už mnoho různých verzí jeho neurálního rozhraní. Vzniklo také mnoho variant neurochirurgického robota, který má rozhraní instalovat do hlavy nositele.

Elon Musk s neurochirurgickým robotem Neuralinku (Zdroj: Neuralink)
Koncepce rozhraní Neuralinku
Celá koncepce neurálního rozhraní, tak jak ji představuje Neuralink – tedy systém používající miniaturní flexibilní elektrodová vlákna, která do mozkové tkáně implantuje robot – není v žádném případě vynálezem Neuralinku. Na vývoji podobných systémů pracovali vědci na amerických univerzitách už dříve.
Sám neurochirurgický robot také nebyl poprvé používán v Neuralinku. Zástupci firmy nejednou zdůrazňovali, že „jen“ vylepšují to, co bylo vymyšleno už dříve. Robot, ze kterého Neuralink vychází, byl patentován skupinou vědců z Kalifornské univerzity v San Francisku a v Berkeley. V prvním dílu této série si jej blíže představíme.
Co chce Neuralink dokázat a proč?
Cílem Neuralinku je vytvoření invazivního neurálního rozhraní za účelem propojení lidského mozku s počítačem. Chce tím umožnit lepší poznání mozku, léčbu neurologických problémů a nakonec spojit biologickou a umělou inteligenci, aby tak zamezil nadvládě myslících strojů nad lidmi.
Jak vypadají jiná řešení stejného problému?
Neinvazivními rozhraními se na tomto místě nemá vůbec smysl zabývat. Ptáte-li se proč, může to pomoci vysvětlit příklad, který uvedla Shivon Zilis, manažerka Neuralinku a matka dvou nejmladších dětí Elona Muska, když se jí ptali, zda Neuralinku nějakým způsobem pomáhá výzkum neinvazivních rozhraní:
Upřímně řečeno prakticky vůbec. Nejde o to, že by neinvazivní rozhraní nebyla užitečná pro poznání mozku, ale hodí se jen pro výzkum některých jeho celostních vlastností. Existuje jedna dost trefná analogie s fotbalovým stadionem při zápase. Sedíte-li někde za branami stadionu, můžete slyšet celé tribuny zpívající chorály a hlasitě reagující na góly nebo jiné situace v zápase. Pokud sedíte přímo na stadionu, ale v poslední řadě, slyšíte trochu více, například lidi kolem sebe nebo některé hlasitější fanoušky z davu. Pokud však chcete slyšet, co říká trenér, hráči nebo rozhodčí, musíte až na hrací plochu. V této analogii jsou neinvazivní zařízení používající například EEG (elektroencefalografii) za branami stadionu, ECoG (elektrokortikografie) nebo fMRI (funkční magnetická rezonance) jsou ekvivalentem míst v poslední řadě, kdežto elektrody Neuralinku jsou přímo na hrací ploše.
Jiné projekty vyvíjející invazivní rozhraní nejdou ve svých cílech až tak daleko jako Neuralink. Jde jim obecně o propojení mozku s počítačem, umožnění ochrnutým lidem komunikace se světem nebo o léčbu různých nemocí. Alternativních přístupů je několik:
- Elektrokortikografie (ECoG) – asi nejméně invazivní z invazivních metod monitorování a stimulování mozkové aktivity. Jde o elektrodová pole umístěná pod lebkou a mozkovými blanami přímo na mozkové kůře. Používá se pro monitorování mozkové aktivity během operací mozku. Pro účely pokročilejšího neurálního rozhraní je však potřeba umístit elektrody přímo do mozku.
- Hloubková mozková stimulace (Deep Brain Stimulation, DBS) – dvě velké elektrody zaváděné hluboko do mozku, používané zejména pro odstranění třesu, který způsobuje Parkinsonova nemoc. Pro cíle Neuralinku je podobný systém pochopitelně zcela nevhodný.
- Utah Array – elektrodová pole o rozměrech asi 5×5 milimetrů, připomínající mučící nástroj. „Nastřelují“ se do mozku beze snahy o zamezení poškození tkání. Mají omezenou biokompatibilitu a životnost a malý počet elektrod (100). Pro ovládání kurzoru myši nebo robotické končetiny fungují docela dobře, ale více od nich nečekejte.
- Paradromics – značně vylepšený interfejs připomínající Utah Array s propracovanější elektronikou a mnohem větším počtem elektrod (až 65 000). Část rozhraní Paradromics, ve které je potřebná elektronika, je v momentální verzi dost velká, ale firma intenzivně pracuje na její miniaturizaci.
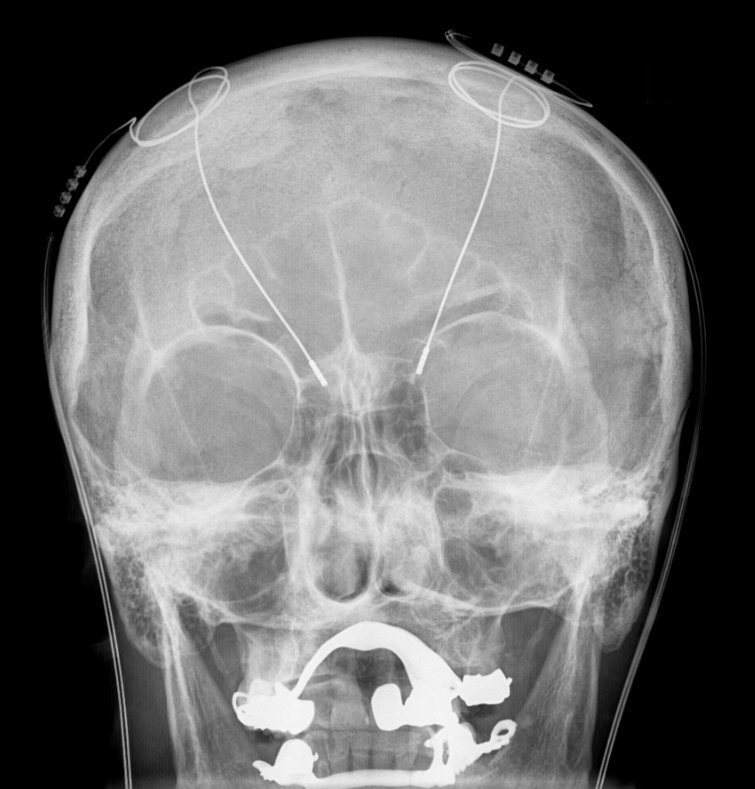
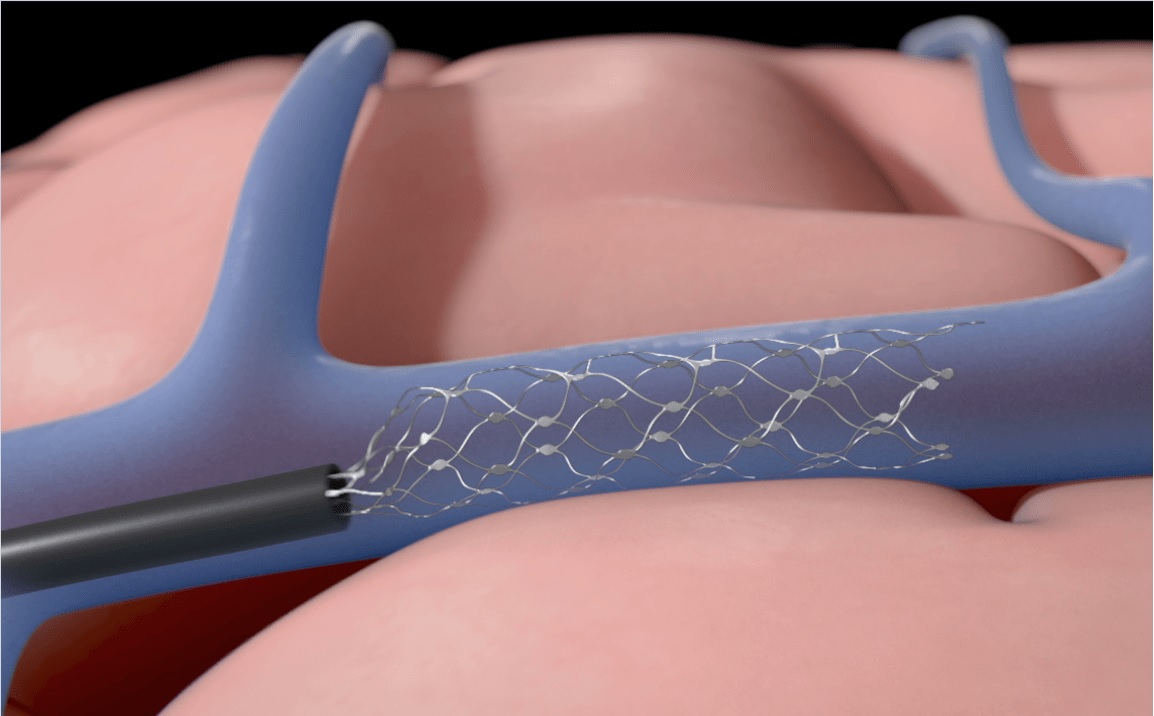
- Stentrode – jde o neurální rozhraní, které vyvíjí a dokonce už i testuje na lidech, konkurent Neuralinku, firma Synchron. Jeho elektrody jsou upevněny na speciální mřížce, která je do mozku zaváděna pomocí krevního řečiště. To je sice méně invazivní než implantace dírami v lebce přímo do mozkové tkáně, ale takovýmto způsobem se nedá dostat do všech částí mozku. K tomu elektrody musí snímat (i stimulovat) aktivitu neuronů přes stěny žilek, což určitě zhorší kvalitu signálu.
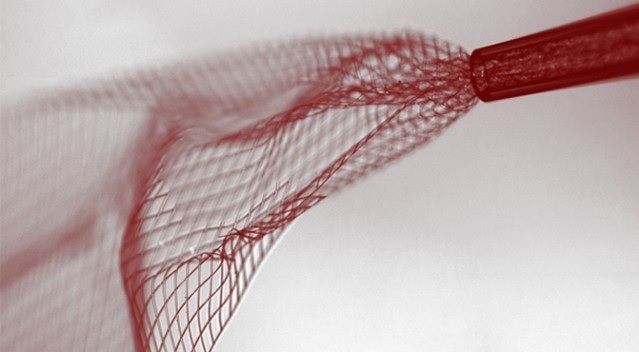
- Mesh Electronics – rozhraní založená na elektrodových mřížkách vstřikovaných injekcemi.
-
- Elektrokortikografie (ECoG)
-

- Hluboká mozková stimulace (DBS)
-
- Utah Array

-

- Interface Paradromics

-

- Stentrode firmy Synchron
-

- Mesh Electronics
Jak by tedy mělo vypadat fungující pokročilé neurální rozhraní?
Zdá se, že by mělo splňovat dvě hlavní podmínky:
- co největší množství elektrod, které interagují s co největším počtem neuronů ve všech potřebných oblastech mozku
- co nejlepší biokompatibilita, zajišťující co nejdelší životnost
Neurochirurgický robot Neuralinku má pomoci tyto podmínky splnit. Jak? Má umožnit rychlou automatickou implantaci velkého množství elektrod mikronových rozměrů do jakýchkoliv částí mozku.
Vývoj robota
Takový robot ještě nedávno neexistoval. Bylo potřeba ho vymyslet a sestrojit. Nebylo to však možné udělat ze dne na den. Vývoj robota, stejně jako vývoj celého rozhraní, je a bude postupný, inkrementální. Neuralink (nebo někteří jeho pracovníci ve svých předchozích projektech) už sestrojil mnoho verzí, z nichž některé základní si představíme v této sérii.
Prehistorie – robot ve verzi beta
První verzí, kterou si představíme, je robot, jenž vznikl ještě před Neuralinkem, ale za přispění vědců, kteří poté v Neuralinku působili. Jde o zařízení, které se pak stalo vzorem pro další verze, vyvíjené už pod střechou Neuralinku. Pracovala na něm skupina vědců z Kalifornské univerzity v San Francisku a v Berkeley.
Autoři projektu
-
- Tim Hanson

-

- Camilo Diaz-Botia

-

- Viktor Kharazia
-

- Michel Maharbiz

-

- Philip Sabes
Jako autoři systému jsou uvedeni:
- Timothy Hanson z katedry fyziologie Kalifornské univerzity v San Francisku, jeden ze spoluzakladatelů Neuralinku, který už však firmu opustil (v roce 2018).
- Camilo Diaz-Botia, bioinženýr z Berkeley i San Franciska, později působící v Neuralinku jako vedoucí procesní inženýr v týmu Vanessy Tolosy, kde se podílel na vývoji elektrodových vláken. V roce 2020 odešel do firmy NeuroOne.
- Viktor Kharazia, rovněž z Katedry fyziologie Kalifornské univerzity v San Francisku.
- Michel Maharbiz, působící na Berkeley na katedře elektrického a počítačového inženýrství na Kalifornské univerzitě v San Francisku a ještě i v ústavu Chan-Zuckerberg Biohub v San Francisku.
- Philip Sabes, neurovědec-bioinženýr působící jak na katedře fyziologie Kalifornské univerzity v San Francisku, tak i na Berkeley. Spoluzakladatel Neuralinku. Ve firmě však už nepůsobí.
Je tedy vidět, že přinejmenším tři z autorů robota později pracovali v Neuralinku. V závěrečných poděkováních vědecké práce pojednávající o této verzi systému, je pak uveden ještě Joseph O’Doherty, neurovědec Neuralinku, který autorům s dílem rovněž pomáhal.
Vývoj podporovala DARPA, tedy Agentura amerického ministerstva obrany pro pokročilé výzkumné projekty.
Co bylo účelem této verze?
Šlo o potvrzení správnosti nového přístupu k invazivním neurálním rozhraním. Pomocí robota chtěli autoři obejít nevýhody, se kterými se potýkali v předchozích výzkumech s použitím například Utah Array. Základem jejich nového systému byla flexibilní mikroelektrodová vlákna a jejich implantace do mozku pomocí robota.
Robot byl koncipován primárně pro implantaci zvířatům, ale autoři určitě mysleli také na vytvoření neurálního rozhraní pro účely lepšího prozkoumání lidského mozku a eventuální pozdější léčby neurologických problémů.
Celý systém je detailně popsán v práci anglicky nazvané „The ‘sewing machine’ for minimally invasive neural recording“, tedy „Šicí stroj pro minimálně invazivní záznam neurální aktivity“. Následující text je shrnutím tohoto 32stránkového dokumentu.
Cíle systému
V první části dokumentu je dopodrobna rozebráno, proč se autoři snažili stvořit nový systém propojení mozku s počítačem a proč jejich zařízení vypadalo tak, jak vypadalo. Jiná rozhraní podle nich mají přinejmenším čtyři oblasti, ve kterých potřebují vylepšit. Jejich systém se tedy snažil:
- minimalizovat mechanické namáhání a nesoulad impedance mezi tkání a elektrodami
- miniaturizovat rozměry implantovaných částí
- minimalizovat poškození krevního systému při implantaci
- maximalizovat počet elektrod a zlepšit možnosti jejich rozmístění
V prvních třech bodech šlo v podstatě o minimalizaci reakce organismu na přítomnost cizího tělesa. Reakce na cizí těleso způsobuje tvorbu jizev, které pro elektrody působí jako izolant a k tomu vytlačují neurony mimo registrační dosah elektrod. To vše znemožňuje záznam mozkové aktivity. Zdá se, že tyto reakce organismu jsou iniciovány chemicky (biokompatibilita) a mechanicky (mikropohyby a kontakt cizího tělesa s organickou tkání). To znamená, že chceme-li reakce eliminovat, musíme použít biokompatibilní materiál a omezit mechanickou zátěž.
Autoři projektu vycházeli z mnoha předchozích experimentů z různých laboratoří. Pokud šlo o minimalizaci mechanického stresu, jednoznačná doporučení z předchozího výzkumu nevyplývala. Šlo-li o rozměry, zdálo se, že vlákna s průměrem menším než 6 mikrometrů nevyvolávají téměř žádnou imunitní reakci organismu testovaných zvířat. Důležitá je také flexibilita, hmotnost a hustota vláken, která musí být podobná jako hustota tkáně, do které jsou implantována. Vlákna, která autoři projektu vyvinuli měla hustotu 1,67 g/cm³ a byla 20 000krát flexibilnější než obvykle používané ocelové nebo křemíkové elektrody rozhraní typu Utah Array.
Krevní řečiště mozkové tkáně je velmi husté. Mikrokapiláry se nacházejí průměrně 40 mikrometrů od sebe. Implantace elektrod „naslepo“ je velmi nebezpečná. Povrchové prokrvení je redundantní a může tolerovat poškození. Problémem jsou však sestupné/vzestupné cévy, jejichž přerušení je nutné se vyvarovat. Cílená implantace elektrod tudíž z důvodu prevence krvácení vyžaduje mikronovou přesnost. Implantace stovek či tisíců elektrod tak není možná bez automatizace.
Komponenty a procesy
Systém se skládal ze tří hlavních podsystémů:
- elektrody
- jehla
- robot
Systém byl testován na krysách. Procedura implantace elektrod vypadala následovně:
- proběhlo vytipování místa pro implantaci
- byla provedena kraniotomie, čili odstranění lebeční kosti a odkrytí tvrdé pleny mozkové
- fotografický aparát připevněný k robotu provedl snímek odkryté části mozku
- speciální software vytipoval místa pro vpichy elektrod
- v každém vybraném místě vpichu byla provedena laserová mikrodurotomie, tedy vypálení otvorů pro vlákna v tvrdé pleně mozkové
- zásobník s elektrodami byl přesunut k místu implantace
- implantační hlavice robota navlékla elektrodové vlákno na konec jehly
- robot vytáhl vlákno ze zásobníku, přesunul se nad místo implantace a provedl vpich vlákna do mozku
- jehla se přesunula zpět k zásobníku a opakovala proces implantace s dalšími elektrodami
- jakmile byla všechna vlákna implantována, jejich volné části byly zafixovány silikonovým gelem
- plošný spoj, ke kterému byla vlákna připevněna, byl uvolněn z elektrodového zásobníku a ukotven v místě lebeční kraniotomie, s použitím dentálního akrylu

Implantační hlavice (A) měla možnost pohybu ve všech směrech tak, aby mohla zachytit flexibilní elektrodové vlákno (B) ve vyměnitelném sterilizovatelném zásobníku (C). Vlákno pak bylo implantováno s pomocí jehly (D) do mozku. Jehla se stáhla z místa vpichu a hlavice se přemístila tak, aby mohlo být zachyceno další vlákno. Vlákna a jehla jsou na obrázku zvětšeny, aby byly vidět. (Zdroj: https://www.biorxiv.org/content/10.1101/578542v1.full#xref-ref-52-1)
Elektrody
Elektrodová pole sestávající z 64 elastických elektrodových vláken byla vyrobena litograficky s použitím polyimidu jako pláště a platiny jako vodiče. Každé vlákno mělo jednu elektrodu schopnou jak záznamu, tak i stimulace. Na konci vlákna byla smyčka sloužící jako záchytný mechanismus pro implantační jehlu. Některá vlákna měla uši nebo ostny, které znemožňovaly jejich pohyb v mozkové tkáni.
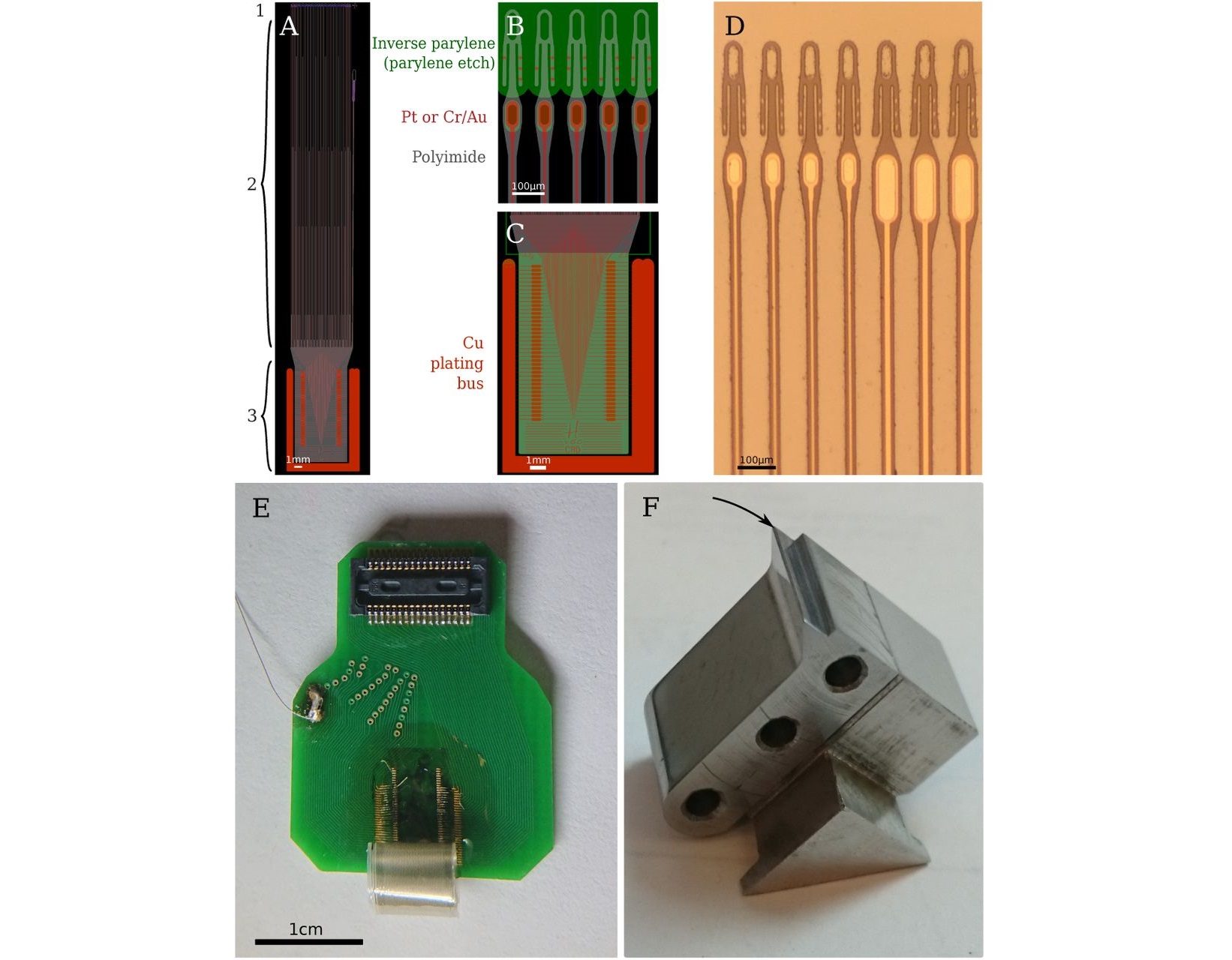
Elektrody a cartridge (kazeta): (A) Příklad elektrodového pole. Červené části byly kovové (platina), šedé byly z polyimidu a zelené z parylenu. (1) Část s elektrodami a záchytnou smyčkou (detail na obrázku B). (2) Vlákno o délce 27,25 mm. (3) Část připojená k plošnému spoji. Měla rozměry 4,2 × 7,7 mm (detail na obrázku C). (B) Detail elektrodové hlavičky se záchytnými smyčkami, elektrodou a uchy, která ukotvovala vlákno v tkáni. (C) Detail části, která byla připojena k plošnému spoji. (D) Elektrody před nanesením parylenu. (E) Fotografie elektrodového pole připojeného k plošnému spoji. (F) Prázdná cartridge (kazeta). Šipka ukazuje na ostrou část, ke které přiléhaly záchytné smyčky vláken.
Proces výroby vláken s elektrodami byl velmi zkomplikovaný. Nebudeme zacházet až do takovýchto detailů. Celý postup je popsán v sekci 2.2 výše zmíněného dokumentu, který představuje celý systém.
Implantační jehla
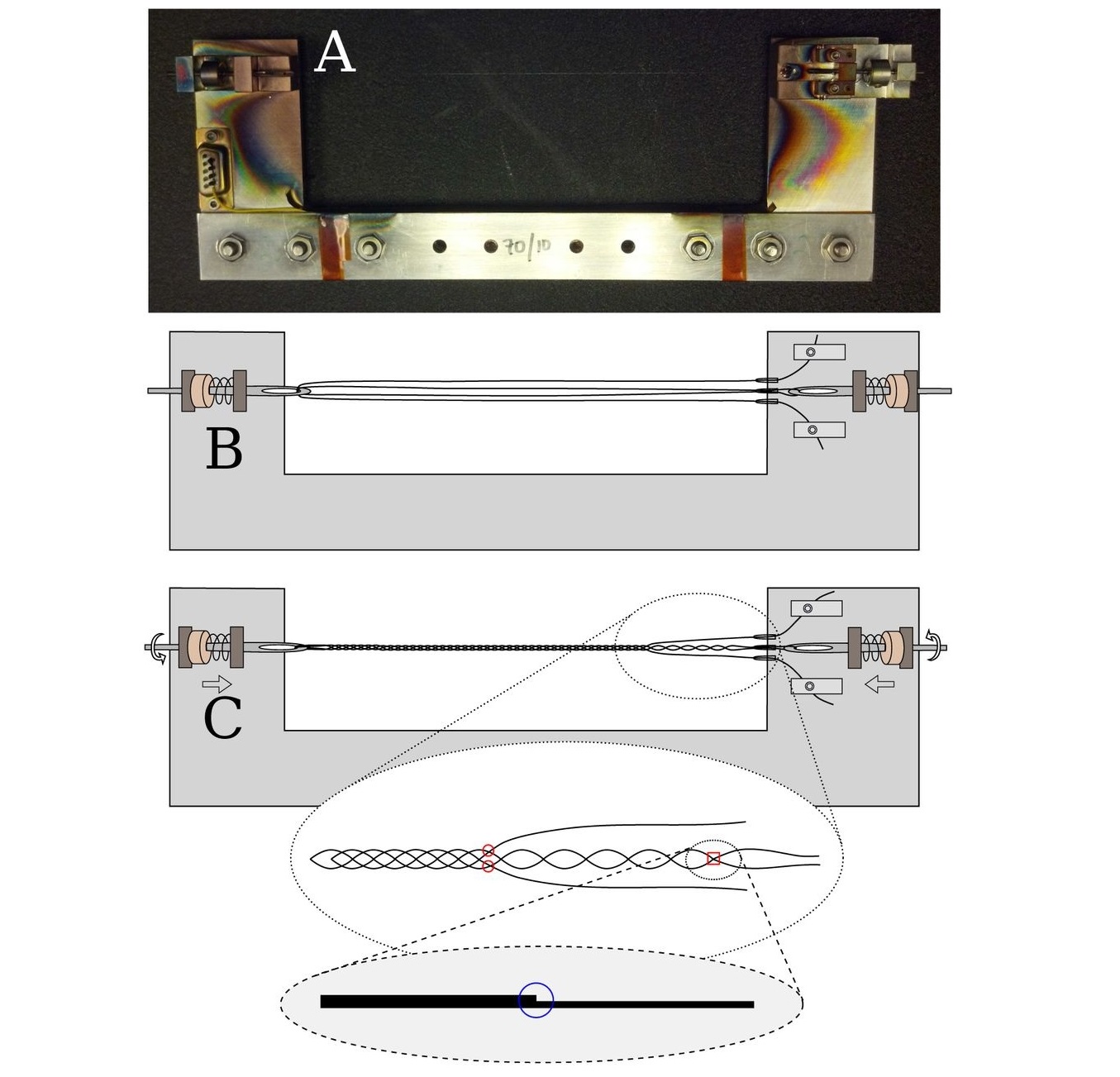
Proces výroby implantační jehly: (A) Fotografie systému pro výrobu jehly s viditelným drátem (před pájením). Vlevo je vidět konektor pro přívod elektrického proudu pro ohřev jehly. (B) Schéma systému před zkroucením drátu. Je vidět, že jde o jeden kus drátu protažený očky. (C) Schéma systému před spájením drátků pomocí mědi. Červenými kroužky jsou znázorněna místa, kde se první dva dráty odlamovaly, a místo, kde se třetí drát odděloval a vytvářel stupeň, ke kterému později přiléhal záchytný mechanismus vlákna.
Jehla byla speciální, velmi důležitou částí robota. Jejím úkolem bylo navléknutí elektrodového vlákna, penetrace mozkové tkáně a pak rychlá retrakce.
Byla vyráběna z drátu z wolframovo-rheniové slitiny (s 26% obsahem rhenia). Proces výroby byl následující:
- jeden kus drátu se navlékl do zařízení znázorněného na obrázku výše tak, aby tvořil tvar písmene W
- jedna strana W (na obrázku vlevo), se mohla volně otáčet, což umožňovalo stočení všech 4 drátů do spirály
- na druhé straně byly dva konce drátu připevněné v mosazných svorkách a uprostřed byla smyčka, kterou bylo možné také otáčet, což umožňovalo vytváření čtyř-šroubovice
- po obou stranách byly pružiny, které drát napínaly
- dva dráty (ukotvené konce) se při stáčení odlomily od šroubovice 1–10 mm před koncovou smyčkou
- celý záchytný systém se stočeným drátem byl pak přesunut do vakuové komory (na obrázcích níže), ze které byl vypumpován vzduch a byla do ní napuštěna směs vodíku a argonu
- pomocí elektrického proudu se jehla zahřála na teplotu přesahující 1500 °C, čímž byl její povrch zbaven veškerých oxidů a jiných nečistot
- na jehlu byla nanesena vrstva mědi, která spájela všechny čtyři drátky v jeden celek
- komora i s jehlou se zchladila, jehla byla vytažena a byly z ní odstraněny přebytečné části drátků odstávající ze šroubovice
-

- Vakuová komora pro výrobu jehly (exteriér)

-
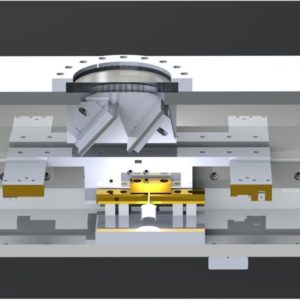
- Vakuová komora pro výrobu jehly (interiér)

Po zakončení celého procesu výroby jehly byl ještě použit velmi jemný smirkový papír (o hrubosti zrna kolem 10 mikrometrů) k zaoblení ostrých hran. Výsledná jehla pak vypadala podobně jako na obrázku níže, i když s mnohem menším úhlem šroubovice, který je zde zvětšen pro názornost. Nakonec byla jehla připevněna do kazety (angl. cartridge) a byla provedena její důkladná mikroskopická inspekce.
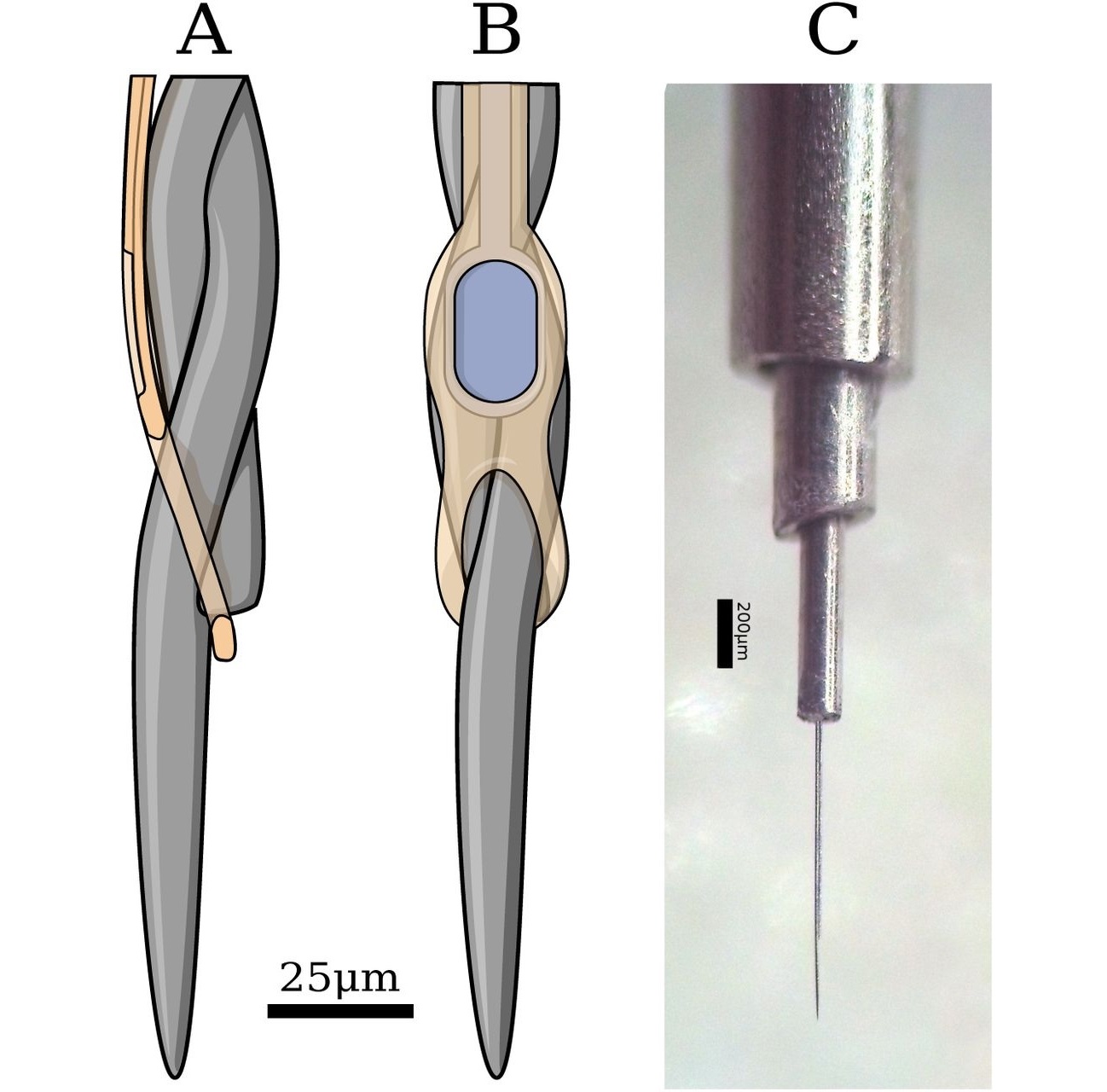
Implantační jehla. Šedou barvou je znázorněna slitina wolframu a rhenia, oranžový je polyimid, modrá je platina. (A) Boční pohled ukazující pozici navléknutého elektrodového vlákna na malém stupni vytvořeném z jednoho z drátků šroubovice. (B) Pohled zepředu. Úhel kroucení šroubovice je zvětšený kvůli názornosti. (C) Fotografie jehly v teleskopické kanyle.
„Šicí stroj“
Kompletního robota vidíme na obrázku níže. Skládal se ze tří hlavních částí / systémů (jejich detailnější popis pak je uveden pod obrázkem):
- implantační hlavice
- zobrazovací hlavice
- soustava posuvných mechanizmů umožňující pohyb obou hlavic

Implantační systém: Vpravo dole vidíme lebku makaka kvůli měřítku. (A) Černobílá zaměřovací kamera s rozlišením 2,3 Mpix. (B) Servomotory pro pinč. (C) Zatahovací mechanismus. (D) Motor. (E) Precizní polohovač nastavující hloubku vpichu jehly. (F) Kamera s mikroskopem a rozlišením 5 Mpix, používaná pro monitoring vytržení vlákna ze zásobníku a jeho implantaci. (H) Pohyblivá část se zásobníkem. Vytáčela se stranou, aby nepřekážela při procesu zaměřování. (I) Pohyblivý světelný zdroj. (J) Cartridge s jehlou zasunutou v teleskopické kanyle. Vedle jehly je tzv. pinč, jehož úkolem bylo přidržování vlákna na jehle. (K) Mechanismus pro zaměřování vláken kvůli navléknutí na jehlu. (L) Objektiv kamery snímající povrch mozku. (M) Objektiv pro laserovou mikrodurotomii. (N) Rozdělovač paprsků pro potlačení oslnění. (O) Servomotory. (P) Montážní bod. (Q) Laser provádějící mikrodurotomie.
Výběr míst pro implantaci a provedení mikrodurotomií
Výběr míst probíhal následovně:
- zobrazovací hlavice nasnímala povrch mozku a prezentovala snímek chirurgovi
- chirurg manuálně vybral místa implantace
- ta pak byla převedena na souřadnice robota
Autoři nejprve experimentovali také s používáním makrodurotomie, tedy manuálního odstranění lebeční kosti a tvrdé pleny mozkové z celé cílové oblasti pro implantaci elektrod. Docházelo však k pohmoždění mozkové tkáně nebo i ke vzniku mozkové kýly, tedy vypouknutí části mozkové kůry do vytvořeného otvoru. Změnili proto přístup a začali používat mikrodurotomie, tedy laserové vypalování malých dírek do odkryté mozkové pleny, přes které pak byla implantována vlákna s elektrodami.
Vpichování elektrod

Příkladová implantace: (A) Jehla byla provlečena smyčkou na konci vlákna, která byla vystavena za okrajem elektrodového podavače. (B) Pinč jehly (angl. needle-pincher) vytáhl vlákno ze zásobníku. Na obrázku jsou elektrody vpichovány do želatinové náhražky tkáně. Pinč dále sloužil k přidržení vlákna na jehle a chránil jehlu proti jejímu ohnutí. (C) Jehla s vláknem se přesunula k místu implantace. (D) Jehla se vysunula až ke tkáni a provedla vpich. (E) Jehla byla po vpichu vysokou rychlostí vytažena z tkáně nebo náhražky, pinč se odsunul stranou a celý proces byl opakován s dalšími vlákny.
Proces vpichování elektrod do tkáně vypadal následovně:
- po provedení mikrodurotomií byla zobrazovací hlavice, která je vykonávala, stažena ze scény
- cartridge s elektrodami byla přesunuta níže k místu implantace, aby vlákna mohla být vpichována do vypálených dírek v mozkové pleně
- byla provedena kalibrace jehly tak, aby bylo možné správným způsobem navlékat vlákna na záchytná očka
- vlákno bylo pomocí pinče (angl. pincher) vytáhnuto ze zásobníku
- jehla byla umístěna do záběru kamer zobrazovací hlavice
- pomocí počítačového vidění a precizních pohybů robota bylo očko na konci vlákna navlečeno na jehlu
- pinč přitisknul navlečené vlákno ke kanyle jehly
- byla provedena implantace vlákna do tkáně přes dírky v mozkové pleně
- jehla byla velkou rychlostí vytažena a vlákno zůstalo v tkáni
Retrakční mechanismus jehly
V raných verzích robota byla pro odpojení vlákna od jehly v tkáni používána rotace jehly, což ale bylo neefektivní. Takzvaný balistický retrakční (zatahovací) mechanismus v pozdějších verzích robota umožnil pomalé, přesně kontrolované vpichování, s následným velmi rychlým zatahováním. Mechanismus také umožňoval, aby se jehla volně otáčela. To zajišťovalo správnou orientaci speciálního stupně jehly, vytvořeného z jednoho z jejích drátků. Ten musel být orientován tak, aby vlákno mohlo být bezpečně navléknuto a zachyceno na jehle.
Testy systému a jejich výsledky
Pro in vivo demonstraci systému autoři použili dospělé samce krys. Testy byly prováděny na Kalifornské univerzitě v San Francisku. Jakým způsobem testy probíhaly, je detailně popsáno ve výše zmíněném dokumentu (v sekci 2.4).
Pomocí systému byly prováděny opakované úspěšné implantace elektrod jak do náhražky tkáně (agaru), tak i do mozků krys. Pokud jde o spolehlivost, pokusné implantace do agaru byly konzistentní a opakovatelné. Spolehlivost in vivo byla omezena chirurgickými faktory, mezi které patřily:
- krvácení v místě implantace
- krev ucpávající kanylu jehly
- kvalita mikrodurotomií
- odolnost jehly a vláken
Konkrétněji: Vyhýbání se krevním cévám udržovalo místo implantace v čistotě, což umožňovalo přesné cílení následných implantací. Pokud však docházelo k poškození cév, krev měla tendenci se šířit a vytvářet subdermální hematomy, které znemožňovaly další implantace. Část této krve unikala na povrch mozku. Mohla pak být nasáta kanylou jehly. Krev se mohla „srazit“ a způsobit zadření jehly v kanyle. Dále pak, pokud byla laserová mikrodurotomie příliš hluboká, mohlo stejně tak dojít k porušení podpovrchových cév a kontaminaci operačního místa nebo kanyly. Pokud byla naopak mikrodurotomie příliš mělká, jehla se mohla zlomit nebo ohnout o zbytek tvrdé pleny mozkové. Většina operací však byla provedena bez větších komplikací a jednou jehlou.
Po některých implantacích se objevovaly v mozkové tkáni léze (poškození) různého charakteru.
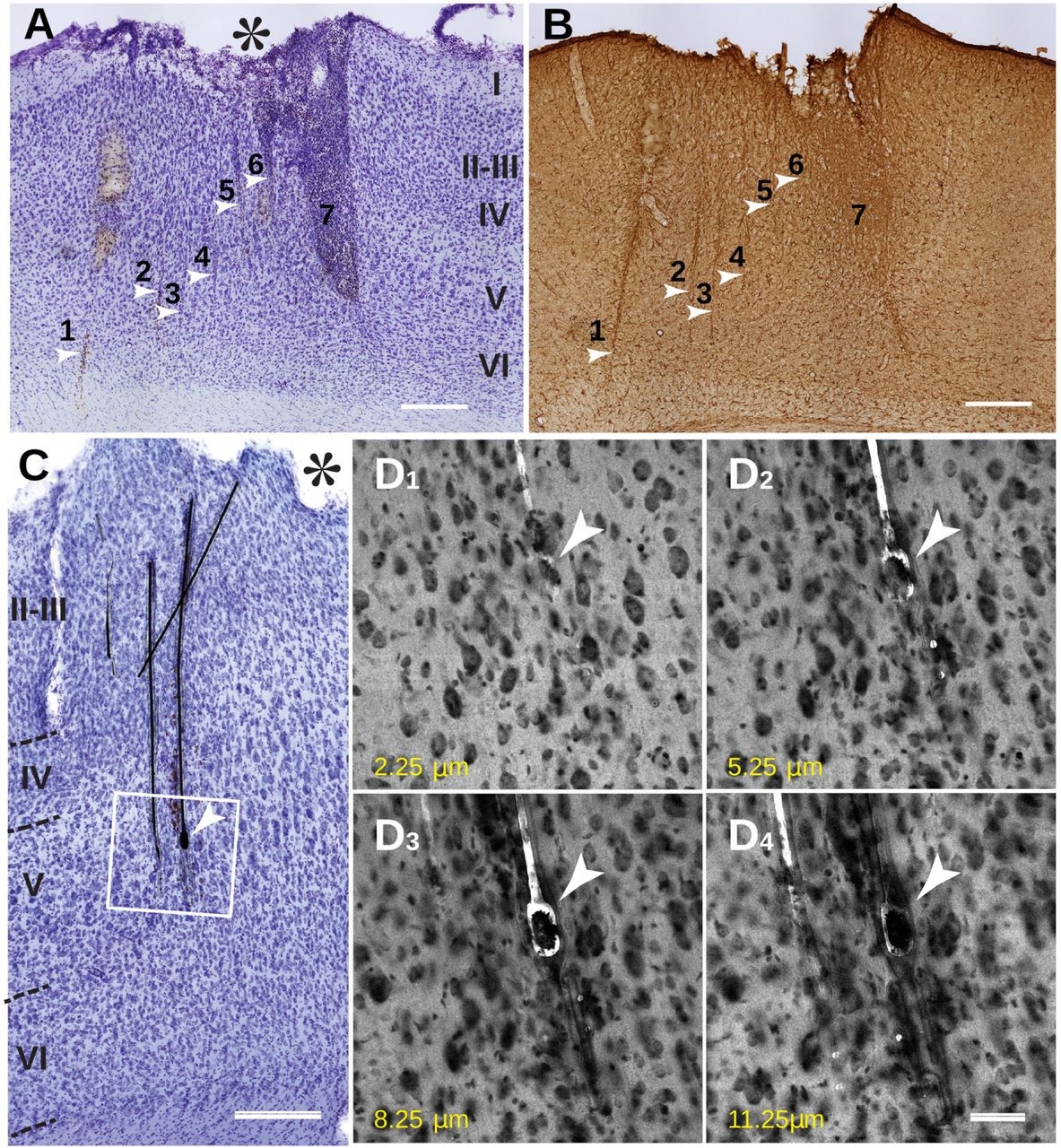
Reakce zvířecí mozkové kůry po dvou týdnech od implantace elektrod. V některých místech byly vidět výraznější jizvy či léze.
Díky automatizaci byl celý proces implantace poměrně rychlý. Zavádění vláken do tkáně, bylo prováděno rychlostí 0,1–2 mm/s. Při retrakci jehly z tkáně robot dosahoval rychlosti až 100 mm/s. Cyklus implantace jednoho vlákna tak trval méně než 9 sekund. To umožňovalo udržet dobu operace v praktickém časovém rámci.
Záznam mozkové aktivity a měření impedance byla prováděna na zařízeních z obrázků níže.


V průběhu testování a zdokonalování rozhraní, byly provedeny záznamy elektrofyziologické mozkové aktivity u čtyřech pokusných zvířat. Šlo o krysy označované pořadovými čísly #5, #13, #15 a #16. Údaje získané u krys #5 a #16 jsou znázorněny na obrázku níže. Krysa #16 měla implantovaných 24 elektrod, které fungovaly po dobu dvou měsíců. Průměrně se podařilo zaznamenat akční potenciály na 39 % implantovaných elektrod (na 3 z 22 elektrod u krysy #5; na 2 ze 13 elektrod u #13; na 7 z 12 elektrod pro #15 a na 16 z 24 elektrod pro #16).
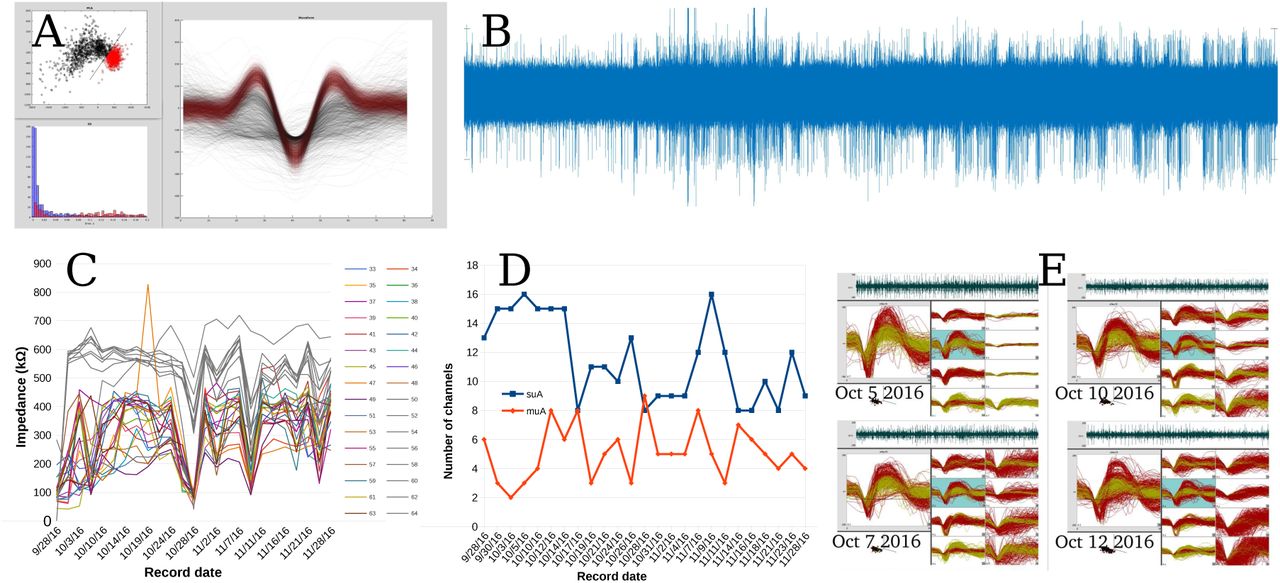
Reprezentativní vzorky elektrofyziologických záznamů: (A) Vůbec první vzruch (angl. spike) zaznamenaný popsaným systémem. (B) Hrubá křivka napětí krysy #5. (C) Vývoj impedance elektrod u krysy #16. Šedé jsou neimplantované kontrolní elektrody. (D) Kvalita záznamu v čase. (E) Příklad týdenních křivek vykazující stabilitu záznamu.
Závěry studie
Autoři uvádějí, že, vezmeme-li v potaz komplexnost mozkové tkáně, nebylo pro ně překvapením, že výsledky implantací nebyly jednoznačné. Nejvýznamnějším faktorem byla hloubka implantace – ve svrchních vrstvách tkáně se projevovaly nejsilnější reakce organismu na cizí tělesa. Podle nich je proto v budoucích výzkumech potřeba se soustředit na zlepšení metod zavádění elektrodových vláken.
Implantace elektrod způsobovala tři typy poškození tkáně:
- Povrchová poškození, která mohla být způsobena přerušením přívodu krve nebo i jinými faktory. To pak mohlo spouštět jednak neurodegeneraci a smrt buněk v horních kortikálních vrstvách, a pak také způsobit otoky tkáně, a tak nepředvídatelně změnit umístění elektrod.
- Penetrační léze, někdy i dost velké, až 500 µm široké, způsobené přímým mechanickým pohybem jehly. To způsobovalo smrt buněk, zjizvení v blízkosti vpichu a nejspíš také sníženou aktivitu neuronů v místě záznamu mozkové aktivity.
- Lokální reakce tkáně na přítomnost implantátu. Není známo, zda reakce způsobovaly ztrátu neuronů, ale mohly ovlivnit elektrické vlastnosti tkáně v místě záznamu.
Všechny zmíněné problémy však byly převáženy poškozováním krevního řečiště, protože to způsobovalo největší problémy.
Podle autorů bylo z výzkumu patrné, že malé a flexibilní implantáty mohou zlepšit dlouhodobé výsledky implantace. Jsou však potřeba lepší metody implantace tak, aby nedocházelo k poškození sestupných cév. Autoři také navrhovali, aby se eventuální navazující práce zaměřily rovněž na zlepšení zaměřování, nejlépe s využitím počítačového vidění, a také na zlepšení pohyblivosti robota. Důležitá pak podle nich byla také další miniaturizace implantační jehly a elektrodových vláken. Pro lepší možnosti záznamu mozkové aktivity navrhovali rovněž umístění většího počtu elektrod na jednotlivá vlákna.
Tato studie úspěšně demonstrovala, že systém zaznamenávání mozkové aktivity využívající flexibilních elektrod a jejich implantace pomocí „šicího stroje“ může být efektivní a je hodný dalšího studia a vývoje.
Tolik tedy první část třídílné série článků o neurochirurgickém robotu Neuralinku, ve které jsme si představili prototyp, který byl vyvíjen ještě na kalifornských univerzitních pracovištích. Prvního „komerčního“ robota, jenž už vznikal v laboratořích Neuralinku, si představíme v příštím díle.
Předchozí články ze série Neuralink pod lupou:
- #1: Seznamte se s Neuralinkem
- #2: Prezentace prototypu implantovatelného čipu N1
- #3: Jednotlivé komponenty prototypu N1
- #4: Klíčové osobnosti Neuralinku
- #5: Historie mozkových rozhraní
- #6: Současnost mozkových rozhraní
- #7: Konkurenční projekty
- #8: Budoucnost neurálních rozhraní
- #9: Nebezpečí neurálních rozhraní, část 1.
- #10: Nebezpečí neurálních rozhraní, část 2.
- #11: Jak si neurální rozhraní představují autoři sci-fi knih
- #12: Neurální rozhraní ve filmech
- #13: Neurální rozhraní v seriálech
- #14: Konkurenční projekty, část 2.
- #15: Jak vznikal externí modul prototypu N1
- #16: Patenty a odborné publikace
- #17: Mezi investory Neuralinku je také herec Will Smith
- #18: Noví investoři
- #19: Přeložená videa Neuralinku, 1. část
- #20: Přeložená videa Neuralinku, 2. část
- #21: Klíčové osobnosti Neuralinku, 2. část
 Přispějte prosím na provoz webu ElonX, aby mohl nadále zůstat bez reklam. Podpořte nás pomocí služby Patreon či jinak a zařaďte se tak po bok ostatních dobrodinců, kteří už finančně přispěli. Děkujeme!
Přispějte prosím na provoz webu ElonX, aby mohl nadále zůstat bez reklam. Podpořte nás pomocí služby Patreon či jinak a zařaďte se tak po bok ostatních dobrodinců, kteří už finančně přispěli. Děkujeme!

Neuralink CZ/SK
Neuralink Chronicles
Podpořte projekt ElonX




Super článek, děkuji a těším se na další díly. Jen moc prosím zvážit, jestli je vážně nutné používat slovo interfejs. V jedné větě třikrát použité slovo “rozhraní” mě vůbec neuráží, zato “interfejs” je jak kdybych dostal facku…
Díky 🙂 Ten “interfejs” už jsme tu kdysi řešili. Těch “rozhraní” už je občas tolik, že je potřeba si pomáhat nějak jinak, aby už to neznělo hloupě. Mě to třeba vůbec nepřijde, protože jsem povoláním síťař a to slovo slyším x-krát denně. Budu se snažit to nepřehánět, ale nic neslibuju 😉
Díky! Těším se na další pokračování. Jako vždycky.
Díky!