

Tesla bude mít základní funkce autonomního řízení hotové letos, musela systém od základu přepsat
Před více než rokem představila Tesla na své konferenci výkonný FSD Computer pro plně autonomní řízení a spolu s ním též autonomní taxi službu Tesle Network. Elon Musk tehdy zmínil, že by tato služba mohla být spuštěna v polovině roku 2020, kdy dle původního tvrzení CEO Tesly měla americká automobilka mít vyvinuté autonomní řízení, na které by nemusel aktivně dohlížet člověk (tedy něco mezi čtvrtým a pátým stupněm autonomie). Realita každopádně byla jiná – přestože Tesla vydala několik vylepšení související s funkcemi Navigate on Autopilot (automatické řízení na dálnici) či Autopark (automatické parkování) a zlepšily se reakce na semafory či značky, tak vývoj plně autonomního řízení nabral zpoždění.
FSD Computer navržený společností Tesla (Zdroj: Tesla)
Tesla se nakonec dopracovala k tomu, že se musela pustit do přepsání svého softwaru. Dle Muska se musel tým zabývající se autonomním řízením pustit do přepsání celého software stacku (části softwarových subsystémů, které dohromady tvoří kompletní program), včetně části zodpovědné za rozpoznávání jednotlivých objektů. Cílem bylo, aby se o více situací začala starat neuronová síť a ubylo tak pevných algoritmů určených pro určité situace. Jen pro upřesnění, Musk uvedl, že je kód umělé neuronové sítě psán v Pythonu (s velkým využitím knihovny PyTorch) a poté kvůli rychlosti konvertován do jazyka C/C++.
Andrej Karpathy, jenž je v Tesle zodpovědný za vývoj autonomního řízení, také přiznal, že přístup jeho týmu je komplikovanější než v případě konkurence, dle jeho názoru ale může jít o jedinou cestu, jak opravdu dosáhnout autonomního řízení ve všech případech. Hlavní rozdíl mezi Teslou a například společností Waymo je totiž následující. Podle Karpathyho firmy jako Waymo prvně namapují danou oblast svým vozem a ostatní automobily poté pomocí přesného lidaru ví, kdy a kde mají jak zatočit a kde jsou překážky. Oproti tomu elektromobily Tesly k situacím přistupují a vyhodnocují je, jako kdyby je viděly poprvé – nemají přesně určeno, jak v další zatáčce otočit volantem, a místo toho se přizpůsobují v reálném čase podle aktuální situace. Zjednodušeně lze říct, že Tesla k situacím přistupuje více lidským způsobem, zatímco Waymo využívá předem načtených dat. Na celou Karpathyho prezentaci se můžete podívat na videu níže:
Celkové přepracování softwaru se každopádně nejspíš blíží ke konci, jelikož na začátku června Musk slíbil spoustu nových funkcionalit, které by měly vyjít do 2 až 4 měsíců. Zatím sice není potvrzené, o jaké by šlo, každopádně Musk nové funkcionality zmiňoval v odpovědi na otázku týkající se funkce Reverse Summon. Majitelé Tesel se zakoupeným balíčkem FSD Capability se momentálně mohou těšit z toho, že si je jejich auto schopno samo nalézt na parkovišti a po cestě se vyhýbat překážkám dle potřeby. Tato funkce je nazývaná Summon a více si o ní můžete přečíst v našem loňském článku. V případě Reverse Summon by pak celý proces probíhal opačně – zastavili byste si přímo před obchodem a Tesla by pak sama našla místo k zaparkování. Tesla také dle Muska usilovně pracuje na vylepšení systému pro rozpoznávání značek a semaforů, to by tedy mohlo taky být jedno z blížících se vylepšení.
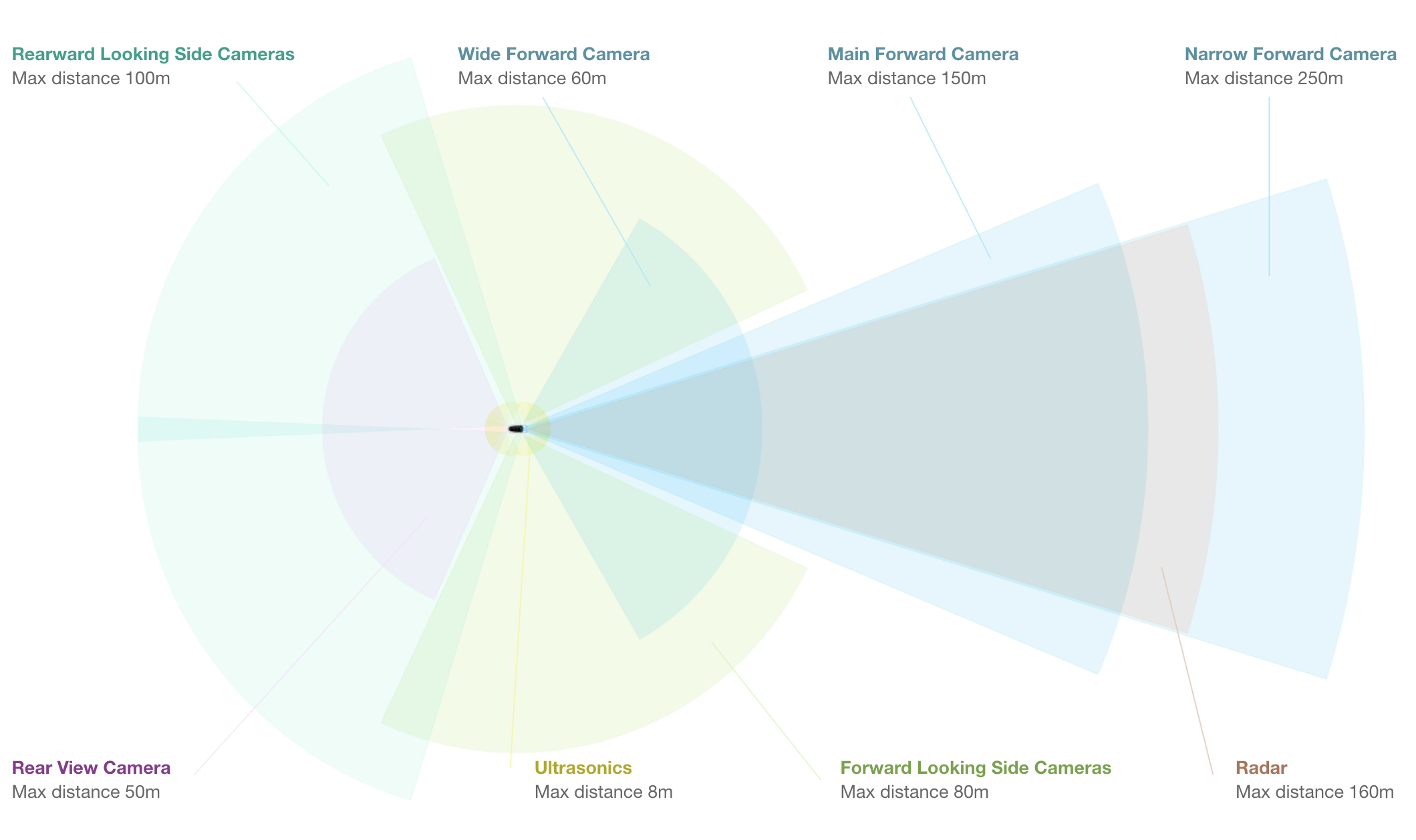
Znázornění kamer a senzorů, kterými jsou vybaveny vozy Tesla (Zdroj: Tesla)
Novinky ohledně autonomního řízení pak poskytl Elon Musk během své virtuální účasti na letošním šanghajském summitu World Artificial Intelligence Conference (celé video z vystoupení níže). Na ní CEO Tesly vyjádřil důvěru v dosažení páté úrovně autonomního řízení relativně brzy a že jeho automobilka bude mít základní funkcionality pro tuto úroveň hotové do konce letošního roku. Zde je ale třeba si uvědomit, co tím měl Musk na mysli. Osobně si totiž myslím, že tím nechtěl slíbit samořiditelné Tesly za všech situacích již příští rok, jak zmiňují některá větší média. Při použití pojmu „hotové základní funkcionality“ bych se spíš přikláněl k dokončení všech potřebných funkcí pro plnou autonomii, jako je rozpoznávání semaforů a značek, vylepšení jízdy po dálnici či právě dříve zmíněnou funkci najít parkovací místo. Musk sám dříve používal výraz „feature-complete“, pod kterým myslel dosažení situace, kdy je vůz schopný dovézt řidiče například z domova do práce a automaticky zaparkovat, zpočátku by ale stále bylo potřeba na systém dohlížet během jízdy. Něčeho takového bychom se tak mohli ještě letos dočkat, je ovšem otázka, jak se bude Muskovo očekávání lišit od reality.
Dosažení autonomního řízení podle Muska nebrání žádný velký problém, ale zbývá jen vyřešit spousty menších problémů a následně složit celý systém dohromady, aby byla neuronová síť schopna řešit různé nečekané situace. V případě Tesly by ale mělo jít pouze o záležitost na softwarové úrovni, jelikož Musk si je jistý, že současný hardware je dostačující. Tesla sice loni zmínila, že by druhá generace čipu pro FSD Computer měla vyjít v roce 2021, ale z hlediska výkonu je současný čip zatím dostačující a nebyl ještě ani naplno využit. Na FSD Computeru se totiž nachází dva takovéto čipy a výkon druhého bylo potřeba využít poprvé teprve před pár měsíci. Musk očekává, že by současný FSD Computer mohl svého maximálního výkonu dosáhnout až přibližně za rok.
Podpořte projekt ElonX
- Tesla za první čtvrtletí vykázala dosud nejvyšší zisk, přestože nevyrobila ani jeden Model S nebo Model X - 27. 4. 2021
- Tesla neinvestuje do placené reklamy, ale vydala alespoň krátké spoty pro seznámení s jejími vozy - 12. 3. 2021
- Bližší seznámení s modernizovanými variantami Modelů S a X od Tesly - 29. 1. 2021




“Na FSD Computeru se totiž nachází dva takovéto čipy a výkon druhého bylo potřeba využít poprvé teprve před pár měsíci.”
O akú potrebu sa prosím jednalo?
V tom prípade ide redunancia čipov stranou?
Z článku to není zřejmé, ale z podtextu se mi zdá, že chce úplně přepsat program za několik měsíců a to na úplně jiném principu a hned jej dát do provozu. Je to vůbec reálné, a kde bere jistotu, že to pomoci neuronové sítě bude OK?
Nechce přespat. To přepisování už probíhá déle než rok. Teď to dokončují. To jestli to bude nebo nebude fungovat už musí dávno vědět. Dat mají hodně.
Pokud ho dokončují a ještě jej neodzkoušeli, kdo může vědět zda taková revoluční změna bude fungovat?
Vývoj obvykle neprobíhá tak, že se rok na něčem pracuje a pak se vyzkouší jestli to funguje, ale spíše jsou to postupné iterace, kdy se pravidelně testuje to co se vytvořilo. A to jak dílčí část, tak celek.
lidaru nebo radaru ?
jel jsem jako spolujezdec několikrát v tesle když snežilo a senzory přestaly fungovat po 3 minutách jízdy.. jediné senzory a cpu pak byly oči a mozek řidiče
Jestli mate na mysli ultrazvukove “parkovaci” sensory, tak bez tech se autopilot docela obejde. Pokud nevidely ven kamery, tak to je vskutku problem.
Jak se to projevovalo ?
Ty kamerky by měly být vyhřívané, ale asi by to chtělo i nějaké stěračky.
Jsou přední kamery pod stíranou plochou?
Člověk má výhodu, že má oči na pohyblivém držáku. Když přes kousek okna chvíli není vidět, pohne hlavou.
Také si toho přece jen víc domyslí.
Ty kamery jsou za předním oknem, na stíraném místě.
Proč by mělo být nevýhodné mít dynamickou mapu trasy aktualizovanou každým projíždějícím autonomním autem a využívanou těmi následujícími? Rychlostní limit, bílé čáry nebo dopravní značky se přeci nemění co pět minut a proč by si to každé auto mělo zjišťovat znovu samo, když už to zjistilo sto aut před ním?
Ideálně zní kombinace. Svoji trasu znám, jezdím tam často. Ale vidím novou díru, novou značku, zelený auto na blikačkách tam taky včera nebylo… Ovšem, jak říkáš, není důvod všechno vidět “poprvé”.
Pokud to dobře chápu, tak to mapování neprobíhá v reálném čase při běžné jízdě. Je to samostatný proces, kdy auto musí předem projet danou trasu (možná i s nestandardními přístroji?), detailně všechno naskenovat, ta data se pak musí zpracovat, poté se zahrnou do nějaké databáze a tu pak teprve využívají “běžná” auta při autonomním řízení. To celé může trvat třeba několik dní a samozřejmě je pak problém, že takhle lze těžko pravidělně mapovat celý svět a každou vedlejší silničku. Proto taky Waymo zatím funguje jen v relativně malých geografických oblastech, které jsou podrobně namapované, a mimo tyto oblasti by auto Wayma mělo výrazně nižší spolehlivost. Přístup Tesly je obtížnější, protože vyžaduje obrovské množství dat, na kterých lze vycvičit neuronové sítě, ale jakmile dosáhnete určité hranice, auto bude schopné jet kudykoli a kdykoli, i když tamtudy předtím žádná Tesla nejela, protože systém je dostatečně chytrý sám o sobě a nespoléhá se na nějaké potenciálně zastaralé mapy.
Taky by mohl být problém s bezpečností, aby někdo záměrně negativně neovlivňoval data…
To můžeš i při druhým přístupu. Přemaluješ značky kupř.
Nicméně souhlasím s Kamilem. Proč nepoužít hotový mapy a ulehčit výpočetnímu výkonu při jejich ověřování. Do práce taky nechodím každej den znovu naslepo.
Tesla mapy taky používá a bude je používat, ale narozdíl od Wayma je nepotřebuje. Je to jako když jedete poprvé novou trasu, kterou neznáte, tak jste schopný ji projet, ale pokud ji znáte, tak to zvládnete lépe a rychleji.
Waymo potřebuje sub-centimetrové mapy k naplánování průjezdu, Tesle slouží jenom jako doplňující informace.
Já osobně vnímám větší problém v tom, že pokud používáte mapy jste spíš více než méně odkázaní na lokalizační systém (GPS nebo podobný).
A v tom je problem jaky?
Souhlasím, že ideální je kombinace. Ono nemusí každé auto provádět centimetrové mapování, stačí když označí existenci nesouladu se základní mapou. Osobně se domnívám, že je nevyhnutelná kombinace obou řešení. Jednak mít přesné mapy,vyžadovat, aby každé auto vysílalo co dělá a co hodlá dělat, semafory které hlásí svůj stav daleko před jejich viditelností atd. Vším tím se razantně ušetří výpočetní výkon a zrychlí provoz. Na druhou stranu rozumím tomu, že s pevným algoritmem si nelze vystačit a narazí na to nevyhnutelně i Waymo. Pokud existuje například algoritmus popisuje auto které stojí nebo se pohybuje po kolech po víceméně předvídatelných drahách dopředu a dozadu, tak bude mít nejspíš v 99% případů pravdu a zrychlí vyhodnocení situace. Problém je v tom jednom % případů. Existují tisíce variant situací, kdy tomu tak vůbec být nemusí. Například pokud to auto v důsledku nehody letí vzduchem, leží na boku, na střeše, nebo se pohybuje po bočním nárazu kolmo ke své ose tak bude mít pevný algoritmus problém. Nemůže si prostě říct, že to co vidí není možné je to chyba a ignorovat to. To je totiž ten problém na, který Tesla narazila a proč pouští neuronovou síť na větší část kódu.Popsat všechny tyto situace pevným kódem je totiž v zásadě nemožné, případně výrazně zpomalující.
Samozřejmě muže být Tesla v situaci, že má tak velký výkon, že si muže dovolit analyzovat v reálném čase úplně všechno a vůbec nepoužívat zjednodušující algoritmy a vzorce chování věcí, strojů lidí, zvířat atd. které vidí. K tomu nejspíš i dojde. Pořád jsme, ale u toho, že systém který bude schopen reagovat i na to co ještě nevidí bude bezpečnější, plynulejší a v důsledku také úspornější a ekologičtější. Tady si myslím, že je chyba že s tím Tesla nepočítá i když minimálně v Evropě už se na standardizaci takové výměny dat pracuje.
Vnímám to jako lajk. Zmapovat celí svět včetně všech ulic mezi domy, musí být časově náročné. Navíc stále dochází ke změnám. Příklad: Bydlím v málem městě kde je křižovatka kde se několikrát měnil hlavní směr. Vedle křižovatky je totiž trať. Tesle to bude jedno. Waymo po změně hlavního směru uvidí stopku, tisíce aut před ním ji tam nemělo, co udělá? Nahlásí error, začne pískat varování. Kdyby jeden systém mělo každé třetí auto, to by byla jiná situace. Jenže kolik jich má být?
A teď hurá do třetí třídy, dostudovat.
Tak třeba dynamické značky na dálnicích a v tunelech. Změna rychlostního limitu, uzavření pruhu, červená před tunelem… + možný výpadek dat a nemožnost aktualizovat data. A ty datové přenosy musí taky někdo zaplatit, v globálu by to byl docela slušný traffic.
Datové přenosy má Tesla slušné už nyní, navíc za pár let bude moct používat Starlink. Už dnes ale má časté a velké updaty, vývojáři si z aut stahují všechny informace podle konkrétních situací (třeba ten sběr všech stopek ve světě), nějaký záznam se snad ukládá při nehodách, streamování hudby, videa a další služby. To vše jede přes datovou SIM Tesly pokud zrovna není připojená na WiFi u Superchargeru.
Krom hudby a videa z toho nic není realtime a v případě výpadku sítě se bez toho obejdete. Hudba se navíc může ukládat i offline, viz Spotify.
Starlink pro Teslu nebude, dokud se nezmenší anténa a výrazně neklesne spotřeba. Momentálně je to spíše tak pro karavan.
Dalo by se to shrnout příslovím: “”Daruješ-li člověku rybu, nakrmíš ho na jeden den, naučíš-li ho lovit, dáš mu potravu pro celý život.” První varianta je krátkodobě výhodnější i rychlejší. Pokud to ale myslíte opravdu vážně a chcete tomu člověku opravdu pomoci, nemáte vlastně ani jinou možnost než ho naučit rybařit, aby se o sebe dokázal postarat sám. Těžko za ním budete chodit každý den po celý život a krmit ho.
Stejně tak je to s autonomním řízením. Pokud to Waymo myslí opravdu vážně a nemá to být jen jednorázová show pro diváky (což, ruku na srdce, teď v podstatě je) nemá žádnou jinou možnost než se mapování vzdát.
Tyto mapy se dělají extra přesné. S přesností objektů na jednotky cm. Potřebujete tedy stovky, nebo spíš tisíce vlastních vozů s řidičem, které jsou vybaveny takovou technikou, a hlavně u kterých si můžete být 100% jistý, že data jsou přesná. Což asi nedosáhnete tím, že běžný řidič v nějakém v budoucnu běžně prodávaném autonomním voze prostě “jen” projede daným místem za vás, když nemůžete garantovat 100% technický stav takového vozu.
Na PC a v podstatě ručně také musíte označit všechny pruhy, popsat značky, semafory atd, protože autonomní auta Waymo to sama nedokáží. Ostatně kdyby to dokázala, tak žádné mapy vůbec nepotřebují. A toto musíte udělat s každou jednotlivou uličkou na celé planetě. Což znamená, že potřebujete doslova desetitisíce lidí a měsíce času na zmapování celé planety. Data totiž musí být extrémně přesné a důkladně ověřené a musíte mít téměř 100% jistotu, že jste nikde neudělali žádnou chybu. Protože poté budou přesně tuto mapu používat další miliony aut. Přestavte si, že byste udělal chybu na D1, kde jen během pár minut projedou stovky aut.
Silnice se také pochopitelně časem mění, staví se nové atd. Takže jen co jste pracně mapu dokončil, už můžete začít
mapovat celý svět znovu. A takto to budete dělat pořád dokola každý rok, po desetiletí, staletí? Přesně jako budete pořád dokola krmit toho člověka? A co uzavírky a nehody? Jak si poradíte s náhlou změnou situace? Cestou do vaší
práce se možná každý den mnoho věcí nemění, ale v globálním měřítku je těch změn každý den enormní množství. A stačí i drobná změna a tisíce aut se na daném místě zastaví zahlásí chybu a nikam nepojedou.
Koukněte se na Google Street View, což je oproti mapě pro autonomní auta naprosto triviální a hloupá mapa. Přesto nemáte jedno místo zmapované častěji než jednou za rok, až dva. U méně frekventovaných míst klidně i 5 let. Kolikrát se vám stalo, že v některých místech chybí nová ulice, nebo nová výstavba, přestože okolo těch domů už chodíte klidně i několik let? A to je potřeba si uvědomit, že na Google mapách kromě samotných zaměstnanců Google dělá doslova desetitisíce dobrovolníků, kteří hlásí chyby, a i mapy přímo vytvářejí. Kolik lidí, času a financí by bylo asi potřeba na vytvoření a neustálou aktualizaci ultra detailní mapy, které navíc musí být na 100 % bez chyby, protože na ní doslova závisí životy 7 miliard lidí na celém světě?
Poněkud tendenční názor. Přece autonomní auta Waymo musí stále snímat situaci na silnici a konkrétní stav semaforů apod. Proto řídící systém těchto aut musí být schopen podle map identifikovat semafory a je možné, že je schopen i identifikovat dopravní značky.
Naopak si myslím, že řídí systém Tesly bude mít problém v reálném čase rozeznat semafory, dopravní značky, současně sledovat provoz na silnici apod. pokud nebude vědět, kde ty křižovatky, značky, semafory apod jsou. Když říkáte, že mapový systém není schopen rozeznat semafory a značky, tak jak to bude schopen u Tesly? Myslím si, že řídící systém Tesel bude rovněž počítat s mapami.
Samozřejmě, ve skutečnosti jsou oba systémy kombinované. Jenom váha obou nástrojů je jiná – u Wayma je výrazně posunuta směrem k mapám, u Tesly směrem k aktuální analýze situace.
Karpaty to zjednodušil.
Když mě na Krétě vedla Googlí navigace sjezdem z dálnice, který neexistoval, chápal jsem to.
Jenomže mně se to samé stalo i na Floridě kousek od Miami, před šesti lety. Sjezd z dálnice byl zakreslený na Google mapě a v reálu tam prostě nebyl. Zrušili ho a nezaktualizovali mapu. A ne, že by byl dočasně uzavřený, byla tam celistvá svodidla a tráva.
Tesla mapy nepotrebuje a nespoleha na nich. Takze nenko problem je +1 pro Teslu
A jak to víte – program ještě není dokončený a odzkoušený v ostrém provozu. Kdo může vědět zda takto revoluční program bude fungovat?